这是波士顿动力机器狗「他爸」?美军80年代机器狗「考古」,身高3米,人机联合操作
共
2498字,需浏览
5分钟
·
2020-10-02 02:27
日期:2020年09月30日
正文共:1982字12图
预计阅读时间:5分钟
来源:机器之心
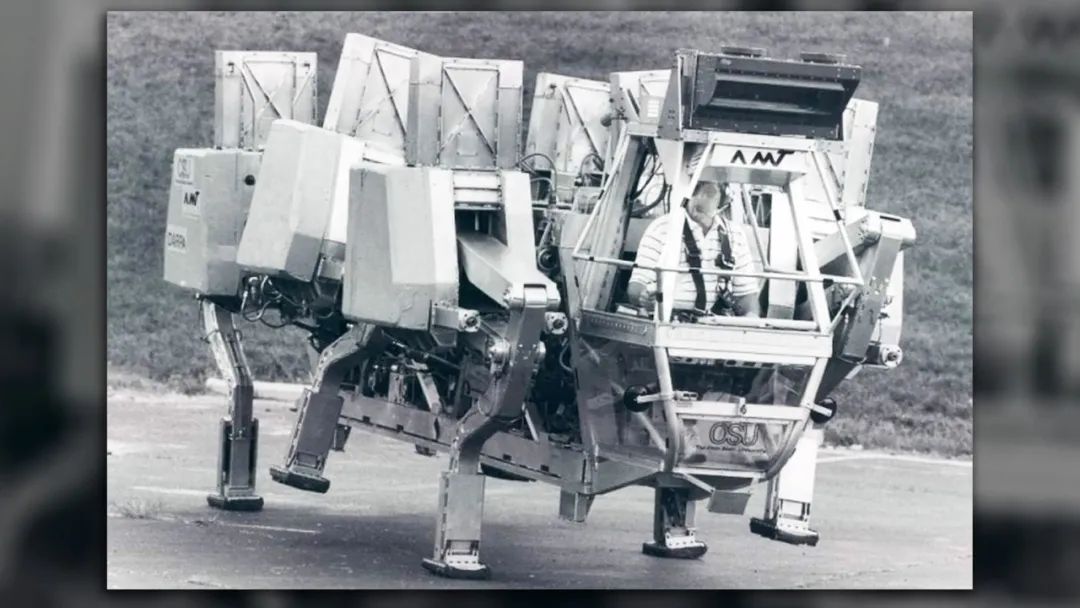
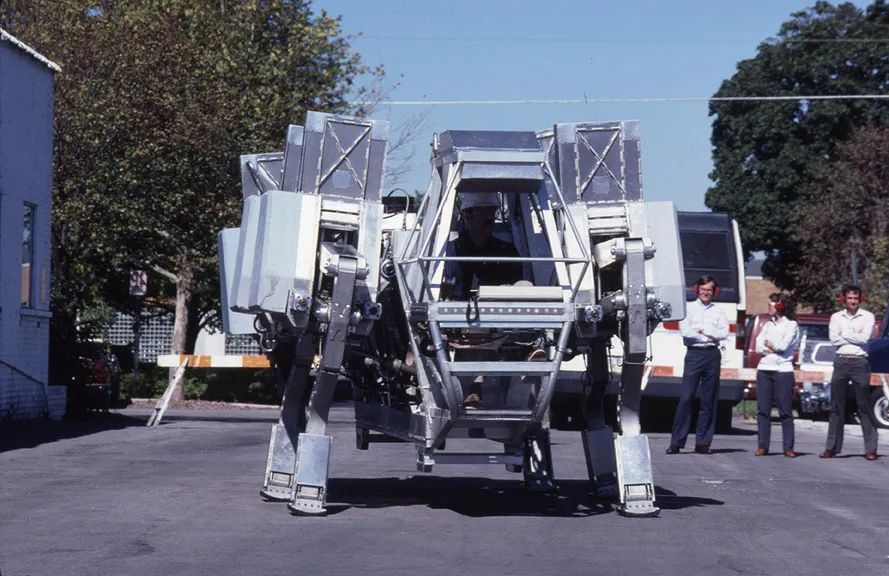
这个 3 米高的庞然大物诞生于 80 年代,比波士顿动力机器狗还早 20 多年。
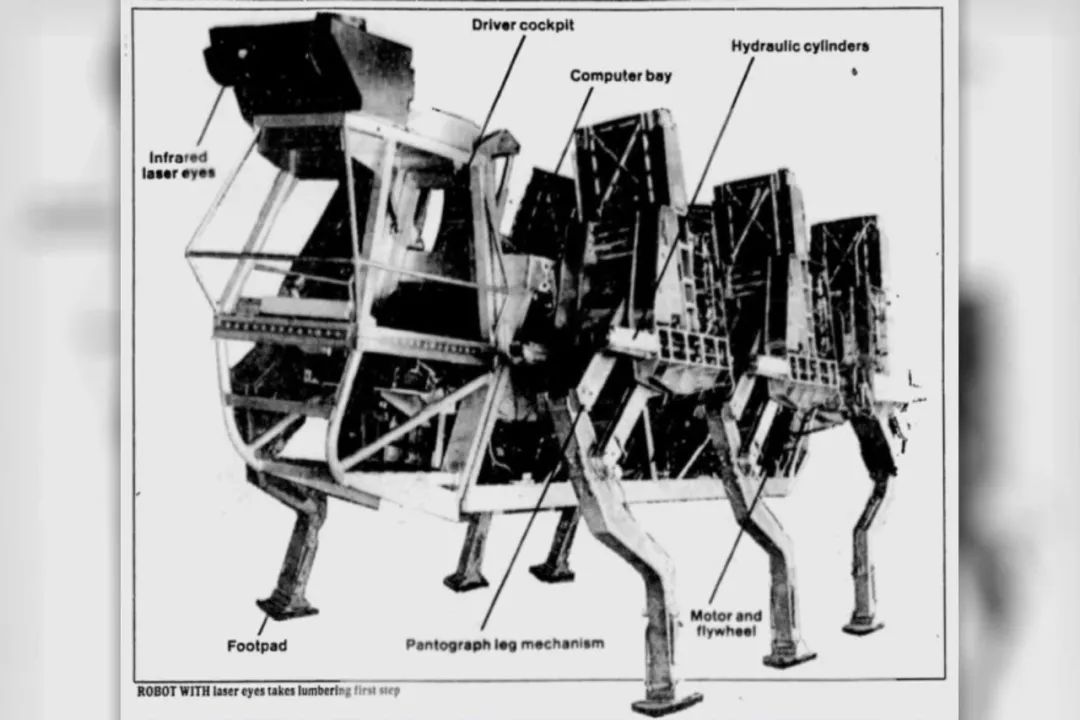
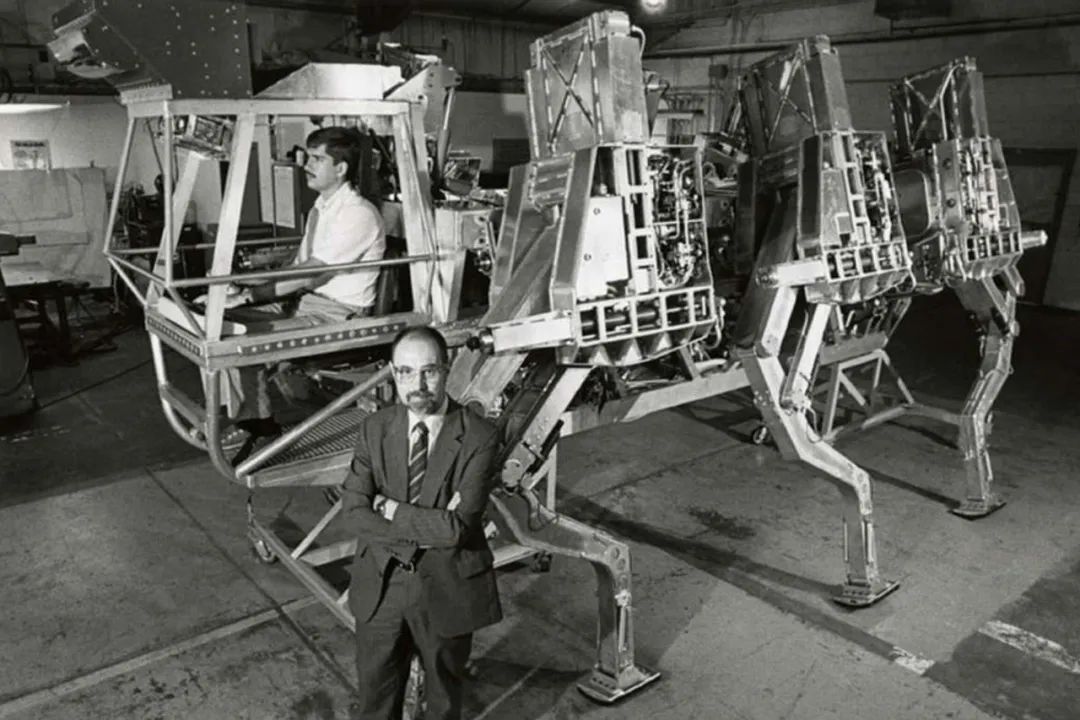
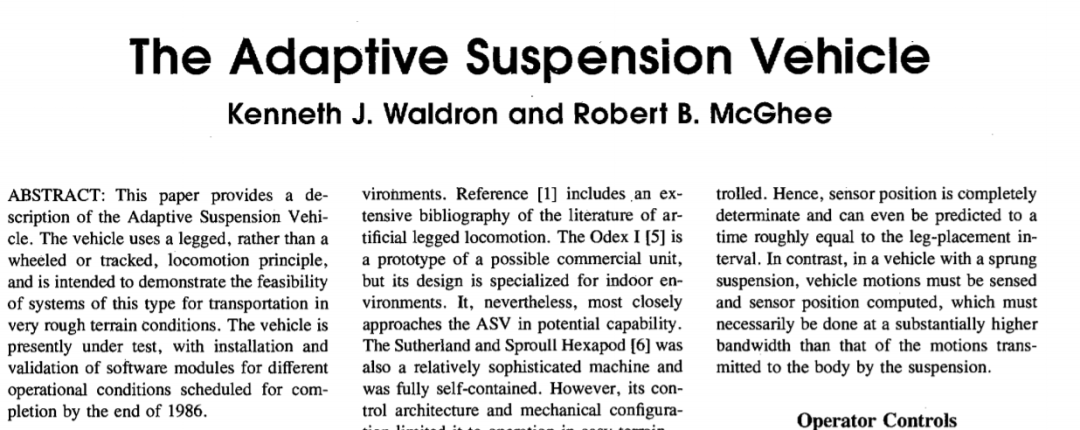
前段时间,波士顿动力机器狗 Spot 正式开售,而且已经有买家晒出了首个开箱视频。波士顿动力机器狗项目由美国国防高等研究计划局(DARPA)资助,初衷是研制一种能够负重的机械骡,和士兵一起在传统机械车辆无法行驶的粗糙地形上作战。2005 年,Spot 的前辈——「Big Dog」机器狗的发布让波士顿动力声名远播。但很多人不知道的是,波士顿动力 Spot 其实并不是 DAPRA 资助最早的「机器狗」,一个名为「ASV」的项目比它还要早二十多年。ASV 是一个身高 3 米、体长 5.18 米的庞然大物,宽度也达到了 2.4 米,相当于一辆卡车,所以有媒体将其称为「行走的卡车」。这个项目始于 1981 年 1 月,由 DARPA 出资、俄亥俄州立大学的两位教授 Robert McGhee 和 Kenneth Waldron 负责打造。项目的初衷是想造出一款足式机器人,在坦克履带无法行进的地形中完成任务。
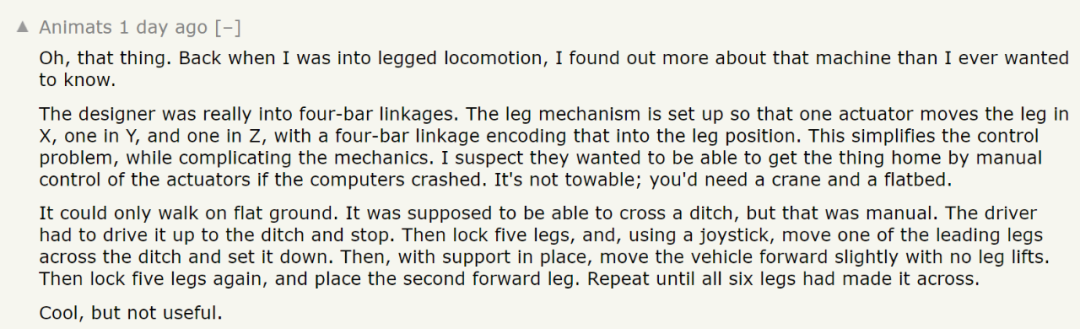
和波士顿动力 Spot 不同的是,ASV 里面还坐了一名操作员,在某些情况下手动操作机器的六条腿:为了减轻操作员在操作过程中花费的体力和脑力,这个庞然大物体内安装了 17 台计算机。按照今天的标准来看,这些计算机其实是很简陋的。机器人肩膀上那 6 个笨重的矩形盒子其实就是计算机所在的位置,每个盒子里都装了一台英特尔 "86/30" 128k, 8-bit 计算机,用来控制机器人的腿部运动。其余的 11 台计算机各自负责不同的任务,比如控制操作员座舱内的 CRT 显示器、分析腿部以及脚上的压力传感器收集到的数据、根据座舱里的 128x128 像素扫描测距仪的数据确定最佳落脚点等。所有这些数据都由操作软件来解读,该软件是用 Pascal 写的,包含 15 万行源代码。而这些代码的任务只有一个:让 ASV 漫步。在座舱里,操作员借助按键和操纵杆控制 ASV 的行走路线。两位教授曾在一篇论文中提到,ASV 的最终目标是实现自主行走。但最终,这个目标没能实现。当然,钱不是问题,这个项目每年都能从 DARPA 那里拿到 100 万美元的资助,真正的限制条件是当时计算机的处理能力。论文链接:http://www.theoldrobots.com/images116/OSU-ASV-19.pdf其实,那些钱不止花在了计算机上,整个 ASV 的机械系统也很复杂。ASV 的核心位置安装了一个 900cc 的摩托车引擎,峰值输出可以达到 91 马力,但它不止为一个巨大的液压泵提供动力。在该引擎和 18 个可变排量泵(用于驱动 ASV 的液压缸)之间有一个 100 磅的飞轮,每分钟可以转 12000 转,存储 0.25 kWh 的能量。这意味着,它可以在一小时内输出 250 瓦的电力。这点非常有用,因为 ASV 的 18 个泵是由一个非常复杂的系统来驱动的。引擎通过齿形传送带将动力从输出轴传递到三个独立的传动轴上。这些装置从前往后连接着整个 ASV,然后通过更多的齿形传送带将动力传到泵上(每条腿 3 个泵)。为了在这种高摩擦系统中完成高耗能动作,ASV 需要的动力要超出引擎所能提供的动力。这种情况下,飞轮储存的能量就派上了用场。当 ASV 突然停下来时,飞轮可以帮助机器从泵中回收一些能量,确保在突然失去动力的情况下平稳地停下来,类似于混合动力汽车的再生制动系统。得益于这种复杂的驱动系统,ASV 的行进速度最快可以达到 12.9km/h(相当于普通人的中级慢跑)。虽然也不是很快,但以这个速度行进时,里面的人会感觉颠簸。而且,这个庞然大物重达 5952 磅(约 2699.8 千克),但有效荷载只有 485 磅(约 220 千克)。在种种因素制约下,ASV 的巡航速度控制在 6.4km/h 左右。由于体型比较大,ASV 可以越过 2 米多高的垂直障碍和 7 米多宽的战壕,但缓慢的巡航速度限制了它的实用性。因此,DARPA 还是对这个项目失去了兴趣,并于 1990 年将其彻底砍掉。经过了这么多年,ASV 已经下落不明,有消息称它被打包放在俄亥俄州立大学的某个地方,也有人猜测它可能在 DARPA 手里。至于这个项目到底有没有意义,目前还存在一些争论。有位网友介绍说,这个大家伙可能只适合在平地行走。如果要跨越一道沟,操作员必须进行手动操作:先将五条腿锁住,使用操纵杆将一条腿迈过去,然后用这条腿做支撑将身体往前挪,接着再锁住五条腿将第二条腿迈过去并重复这个步骤,直到六条腿都迈过去。因此,ta 觉得这个东西没什么用。但也有人认为,这个项目所踩的坑可以为之后的研究提供很多借鉴,钱花得不冤枉。不过可以肯定的是,开着这么一辆机器「卡车」在街上走肯定比遛波士顿动力机器狗还拉风。参考链接:https://www.thedrive.com/news/36157/the-us-army-spent-millions-developing-giant-six-legged-walking-trucks-in-the-1980s
点赞
评论
收藏
分享

手机扫一扫分享
举报
点赞
评论
收藏
分享
手机扫一扫分享
举报





 下载APP
下载APP