
解剖8051内核如何进行多任务切换
最近在玩新唐单片机,这个跟我之前用的51内核是一样的,然后今天觉得跑下多任务,自己研究了下,跟几个同学还讨论了,发现有些人对切换过程还不是十分明白,所以发个文章出来。
直接上代码
#include "MS51_16K.h"
/*
* UART0 initial setting
* include sys.c in Library for modify HIRC value to 24MHz
* include uart.c in Library for UART initial setting
*/
void initialize_UART0(void)
{
MODIFY_HIRC(HIRC_24);
P06_PUSHPULL_MODE;
UART_Open(24000000,UART0_Timer3,115200);
ENABLE_UART0_PRINTF;
}
void delay_ms(unsigned int n)
{
unsigned int i;
for(i=0;i<n;i++)
_delay_();
}
void Timer_ISR (void) interrupt 17 //ISR for self wake-up timer
{
_push_(SFRS);
clr_WKTF; //clear interrupt flag
_pop_(SFRS);
}
void initialize_Timer(void)
{
WKCON = 0x00; //timer base 10k, Pre-scale = 1/16
//RWK = 0XFF; // if prescale is 0x00, never set RWK = 0xff
RWK = 0X00;
ENABLE_WKT_INTERRUPT; // enable WKT interrupt
ENABLE_GLOBAL_INTERRUPT;
set_EIPH1_PWKTH;
set_WKCON_WKTR;
}
#define MAX_TASKS 2 /*任务槽个数.必须和实际任务数一至*/
#define MAX_TASK_DEP 100 /*最大栈深.最低不得少于2个,保守值为12*/
unsigned char idata task_stack[MAX_TASKS][MAX_TASK_DEP];/*任务堆栈.*/
unsigned int task_id; /*当前活动任务号*/
unsigned int max_task = 0;
unsigned char idata task_sp[MAX_TASKS];
void task_switch()
{
task_sp[task_id] = SP;
if(++task_id == max_task)
task_id = 0;
SP = task_sp[task_id];
}
void task_load(unsigned int fn, int tid)
{
task_sp[tid] = task_stack[tid]+1;
task_stack[tid][0] = (unsigned int)fn & 0xff;
task_stack[tid][1] = (unsigned int)fn >> 8;
++max_task;
}
void task1()
{
static unsigned char i;
printf("task,SP:%x\n",(int)SP);
while(1)
{
i++;
printf("task#1\n");
delay_ms(100);
task_switch();
}
}
void task2()
{
static unsigned char j;
while(1)
{
j+=2;
printf("task#2\n");
delay_ms(100);
task_switch();
}
}
void switch_to(unsigned int tid)
{
task_id = tid;
SP = task_sp[tid];
return;
}
void main(void)
{
initialize_UART0();
Disable_WDT_Reset_Config();
printf("~~~~~~~~~~~~~~~~MainStart...\n");
task_load(task1, 0);//将task1函数装入0号槽
task_load(task2, 1);//将task2函数装入1号槽
switch_to(0);
printf("~~~~~~~~~~~~~~~~MainEnd...\n");
}
单片机运行输出
代码很简单,就是两个任务进行不断的切换,每个任务进行相应时间的延迟。
先说下第一个函数
把任务函数转载到二维数组保存起来,而且任务函数地址和任务的tid编号要对应。
void task_load(unsigned int fn, int tid)
{
task_sp[tid] = task_stack[tid]+1;
task_stack[tid][0] = (unsigned int)fn & 0xff;
task_stack[tid][1] = (unsigned int)fn >> 8;
++max_task;
}
task_sp 用来表示任务的数组
task_stack 用来保存任务函数的地址
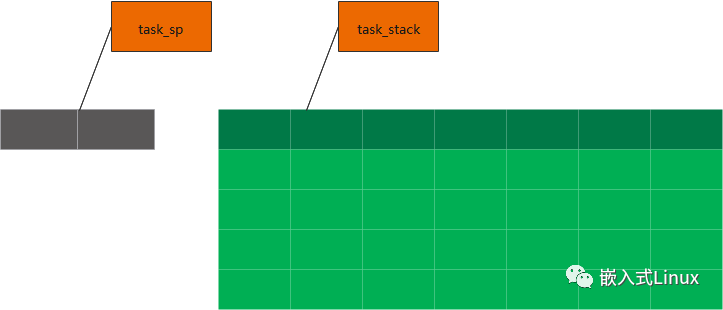
说下这行代码
task_sp[tid] = task_stack[tid]+1;
后面的 + 1 ,不知道大家有没有疑惑。
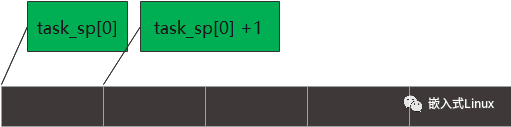
+1 简单理解就是指向了下一个位置
再解剖第二个函数,等下你就知道这个作用的奇特
用来做任务的切换,先保存之前运行的任务函数地址,再改变任务id,把对应任务id的函数地址赋值给SP。
void task_switch()
{
task_sp[task_id] = SP;
if(++task_id == max_task)
task_id = 0;
SP = task_sp[task_id];
}
它是妙处不是在这个函数的本身,而是只有比较深入的了解函数调用的过程,才明白其中的奥妙。
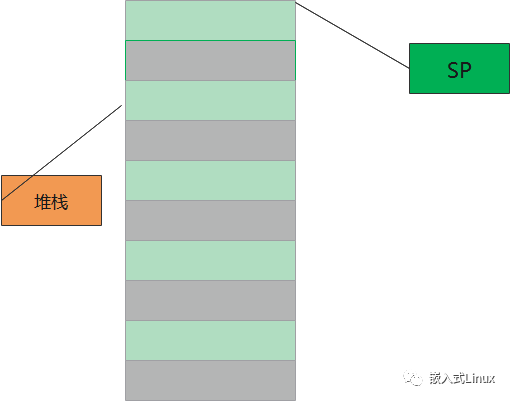
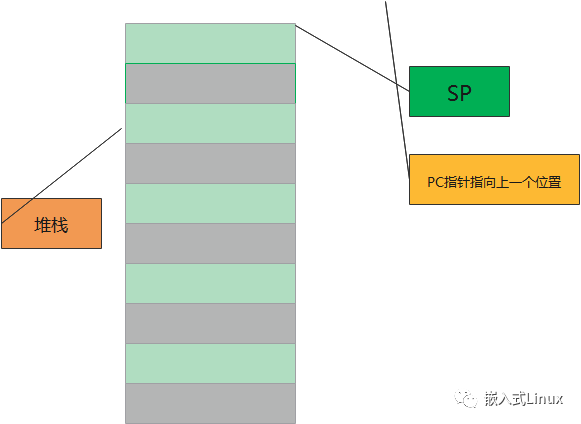
SP 是堆栈指针,用来保存当前堆栈的位置
上面的函数是在进入函数的时候,把当前堆栈的值保存在 stak_sp 中,然后更改stak_sp 的值,再赋值给SP。
说如何切换吧
void switch_to(unsigned int tid)
{
task_id = tid;
SP = task_sp[tid];
return;
}
调用函数 switch_to(0) 之前 堆栈和PC指针是这样的
调用函数 switch_to(0) 之后
我们需要把PC之前的值,保存在SP里面,然后呢,PC就开始执行switch_to函数体里面的内容。
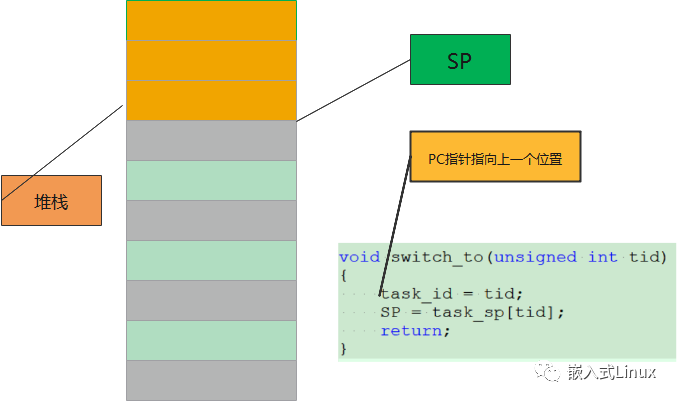
然后,改变SP的值,让SP的值等于需要执行函数的地址
函数退出的时候,PC指针又会从SP堆栈位置拿到之前保存的那个地址「实际上已经被我们修改了」,去继续执行。
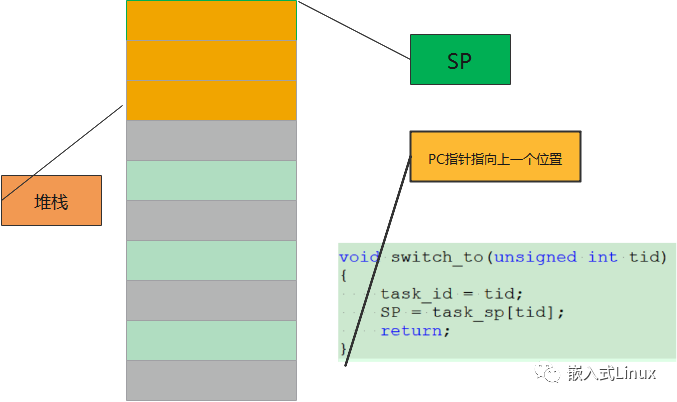
就是通过这样不断的切换,完成了多个函数交换执行。
这是最基本的多任务系统,代码也不是非常完整,喜欢研究的同学,可以再看看网上的例程。
我这次用的是芯唐 MS51FB9AE 芯片。
有做这方便的同学,欢迎一起讨论~

评论