
用Arduino自制一个小型蜘蛛机器人
来源:整理自网络素材
大家好,我是肖遥,偶尔看到一个小项目,很好玩,真怀念以前在实验室的时光,可以自己做一些小玩意,可惜现在工作家庭都占有时间了,只能看着了~
这个小机器人作者还在改进当中,目前具有抛网、攀爬和摆动的能力。
主要器材
Arduino UNO Arduino Nano R3
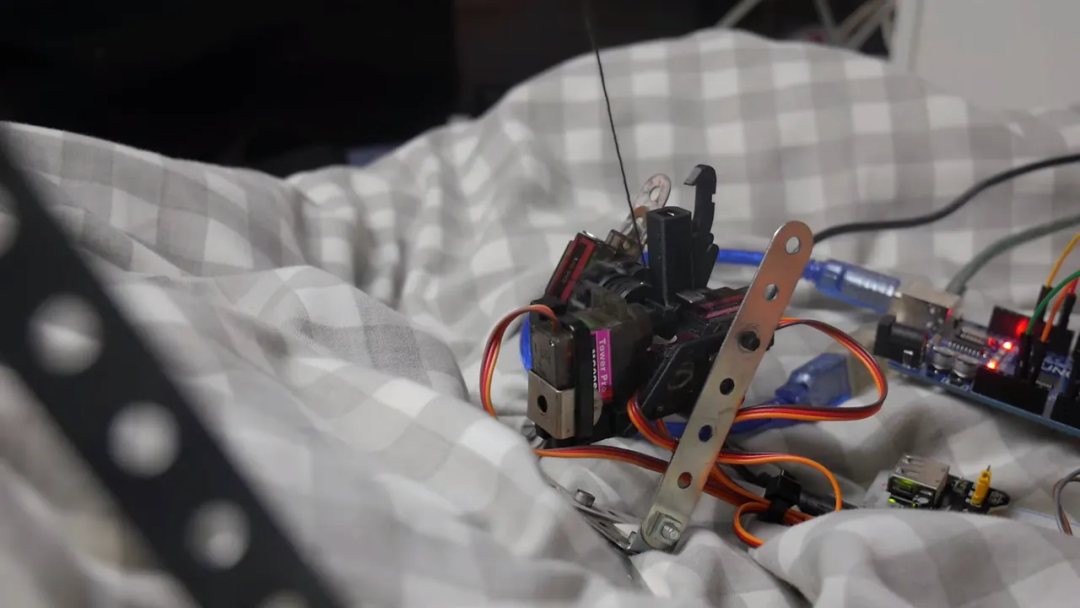
在用CAD设计了一个框架模型后,作者3D打印出了各部件,把所有的零件放在一起,做了组装。
蜘蛛机器人的主板是由一个Arduino Nano控制的(作者一直在使用UNO做原型,但Nano较小的外形尺寸对最终的建造来说要好得多),一个HM-10蓝牙模块,所以可以用手机控制机器人,以及一个pca9685伺服驱动器。
制作过程
首先作者要解决蜘蛛机器人“吐丝”的问题。这边作者很快想到了利用一个抓钩的想法。
然后是另一个问题:
1.“蜘蛛丝”应该用什么材料?(经过一些快速的测试,作者最终使用了凯芙拉线,简称“芳纶”)
2.抓钩要如何发射出去?
这边作者没有使用压缩空气,而是决定制作一个弹簧装置(实际上使用了一个圆珠笔的弹簧),因为抓钩和线很小很轻,用这个小弹簧可以更容易装在机器人里。
整个发射装置通过推入钩子和设置扳机来加载,然后通过电机推下扳机杆来触发。还有一个额外的电机来控制上下瞄准。
下一个挑战是绞盘和释放机制,用于拉紧钩子,爬上网,并在合适的时机在摆动释放。
这边作者尝试了很多次,第一次,整个机器人直接散架了……

调整参数,在第二次摆动的尝试中(这次更高更远),机器人的组件成功地保持在了一起,至少对于原型机来讲,算是成功了。

作者也说,这个会是在下一步设计中需要重点改进的地方。
初步效果展示
目前,机器人已经可以成功完成爬墙!
甚至已经可以去偷薯片了!

原文链接:www.hackster.io/adambeedle/robot-swings-and-climbs-like-spider-man-32ed8c
项目作者: adambeedle
译文首发于DF创客社区
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ 关注我的微信公众号,回复“加群”按规则加入技术交流群。
欢迎关注我的视频号:
点击“阅读原文”查看更多分享,欢迎点分享、收藏、点赞、在看。