
重磅! SLAM从入门到精通系统教程汇总
3D视觉工坊相继推出了《透彻刨析室内、室外激光SLAM关键算法原理、代码与实战》、《激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战》、《彻底搞懂基于LOAM框架的3D激光SLAM:源码剖析到算法优化》、《彻底搞懂视觉-惯性SLAM:VINS-Fusion原理精讲与源码剖析》四门SLAM精品课程,授课老师均为国内一线大厂算法工程人员和海内外高校博士,所有课程均提供数据和源码!微信扫码加入学习~
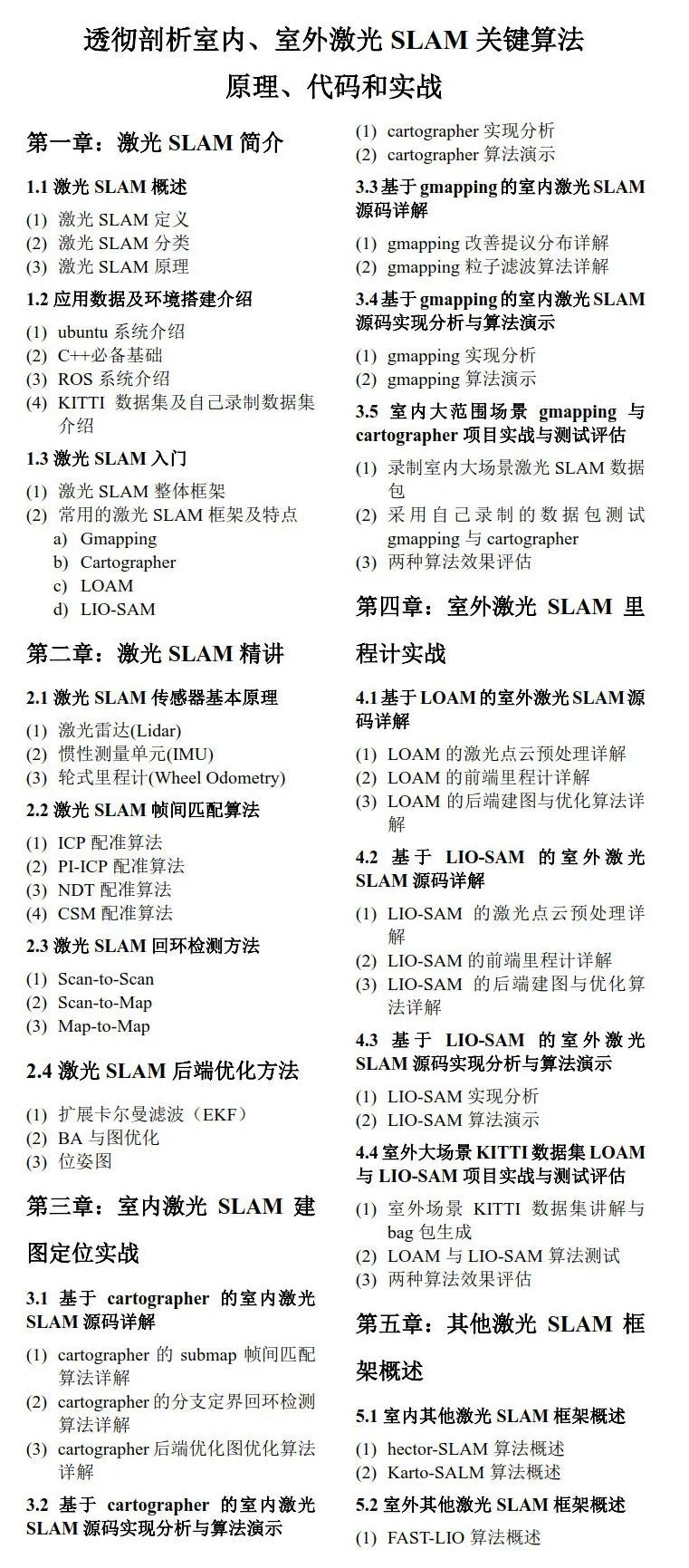
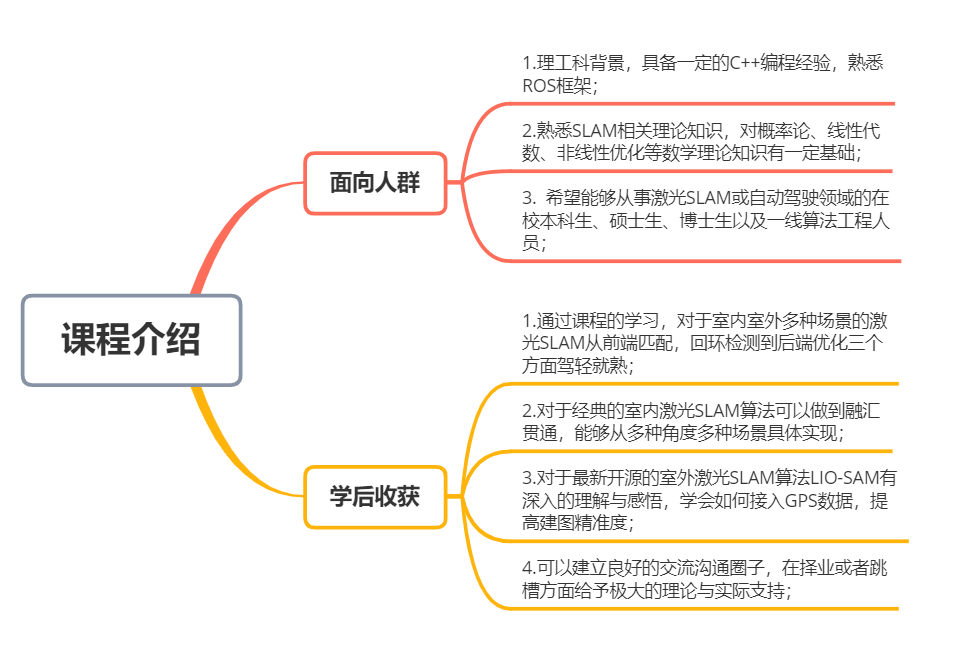
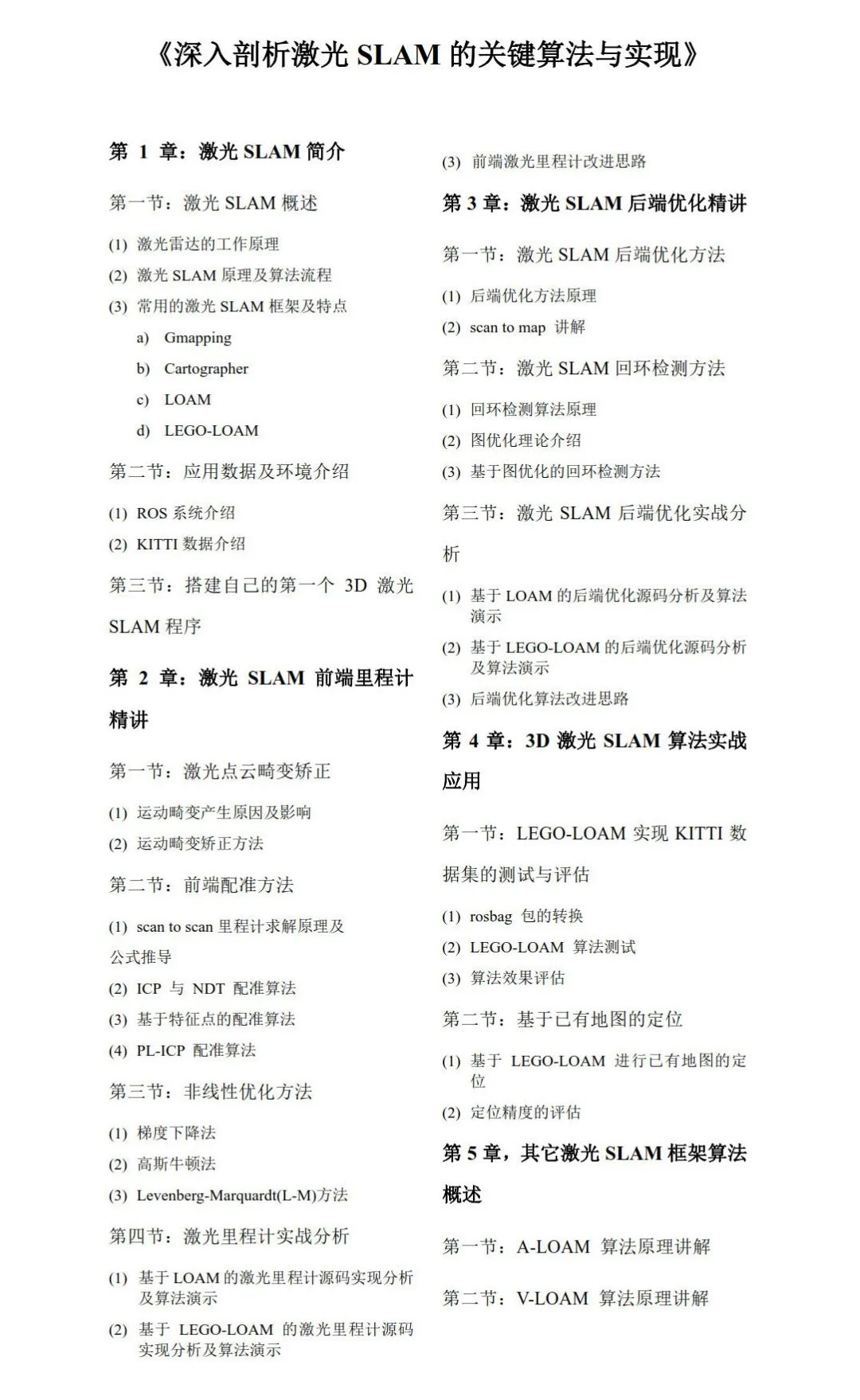
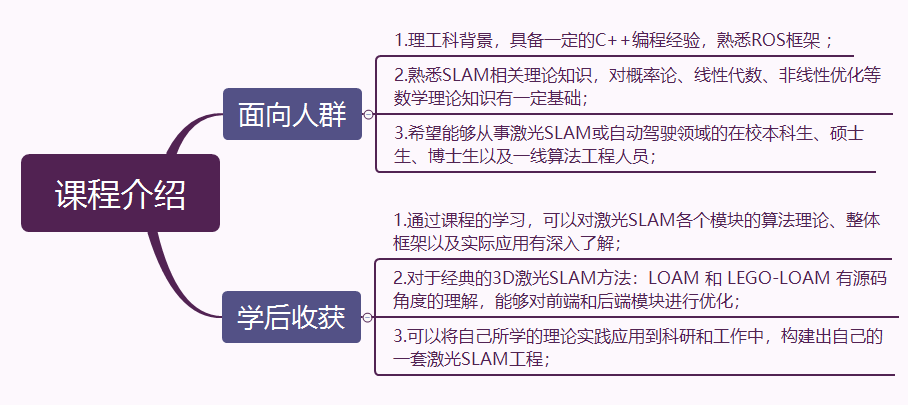
透彻刨析室内、室外激光SLAM关键算法原理、代码与实战
▲微信扫码可查看、购买、学习课程
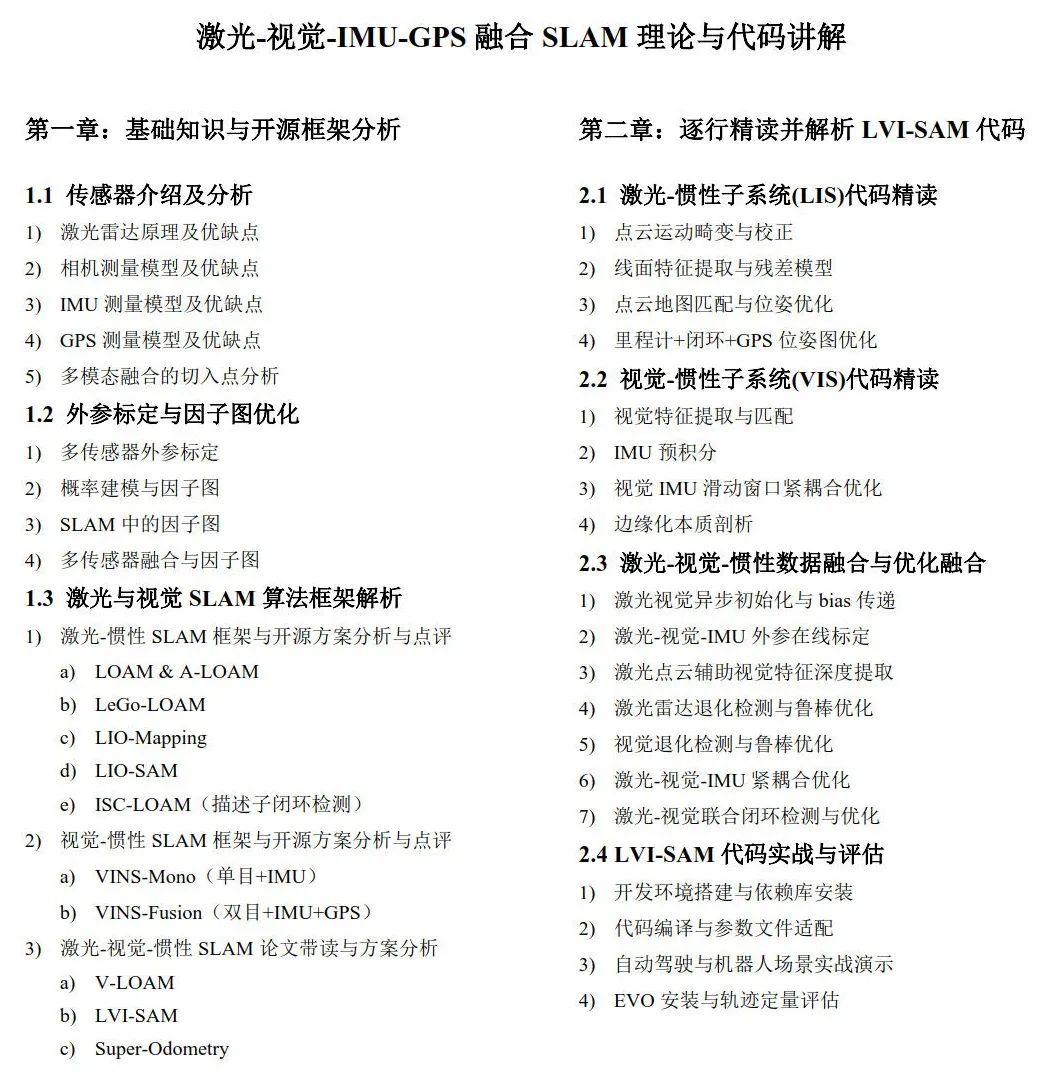
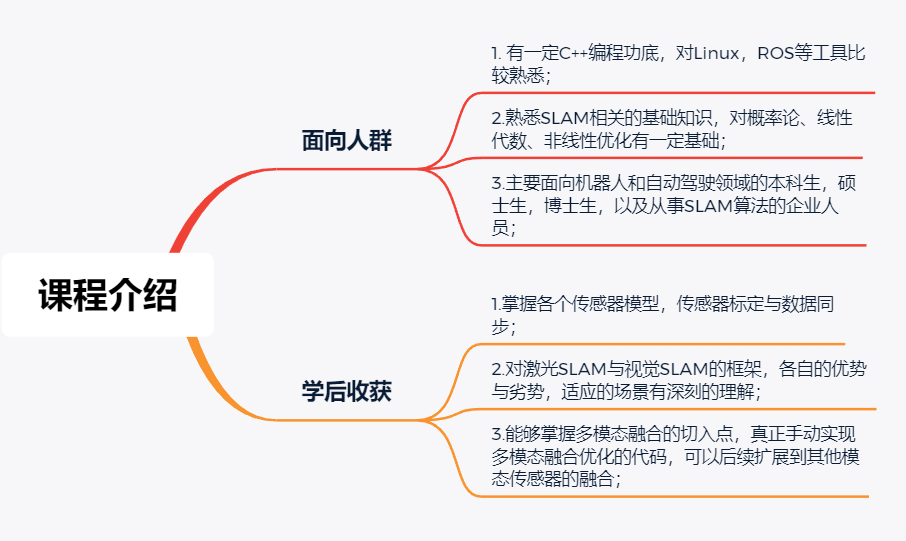
激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战
自主导航是机器人与自动驾驶的核心功能,而SLAM技术是实现自主导航的前提与关键。现有的机器人与自动驾驶车辆往往会安装激光雷达,相机,IMU,GPS等多种模态的传感器,而且已有许多优秀的激光SLAM与视觉SLAM算法。但是每种模态的传感器都有其优点和缺点,如相机只能测量2D图像,且容易受光照和夜晚的影响;激光雷达获取的3D点云较为稀疏,而且在长走廊,隧道,以及开阔场景中容易发生退化;GPS测量极易受到环境的干扰;每种模态的传感器只能在适当的环境中发挥积极的作用。因此,我们希望以适当的方式融合多种模态的测量,通过优势互补,使SLAM算法能够在各种挑战性环境下持续输出鲁棒且精确的估计结果。因此无论是学术界还是工业界,多模态融合是未来SLAM发展的必然趋势。
▲微信扫码可查看、购买、学习课程
彻底搞懂基于LOAM框架的3D激光SLAM:源码剖析到算法优化
▲微信扫码可查看、购买、学习课程
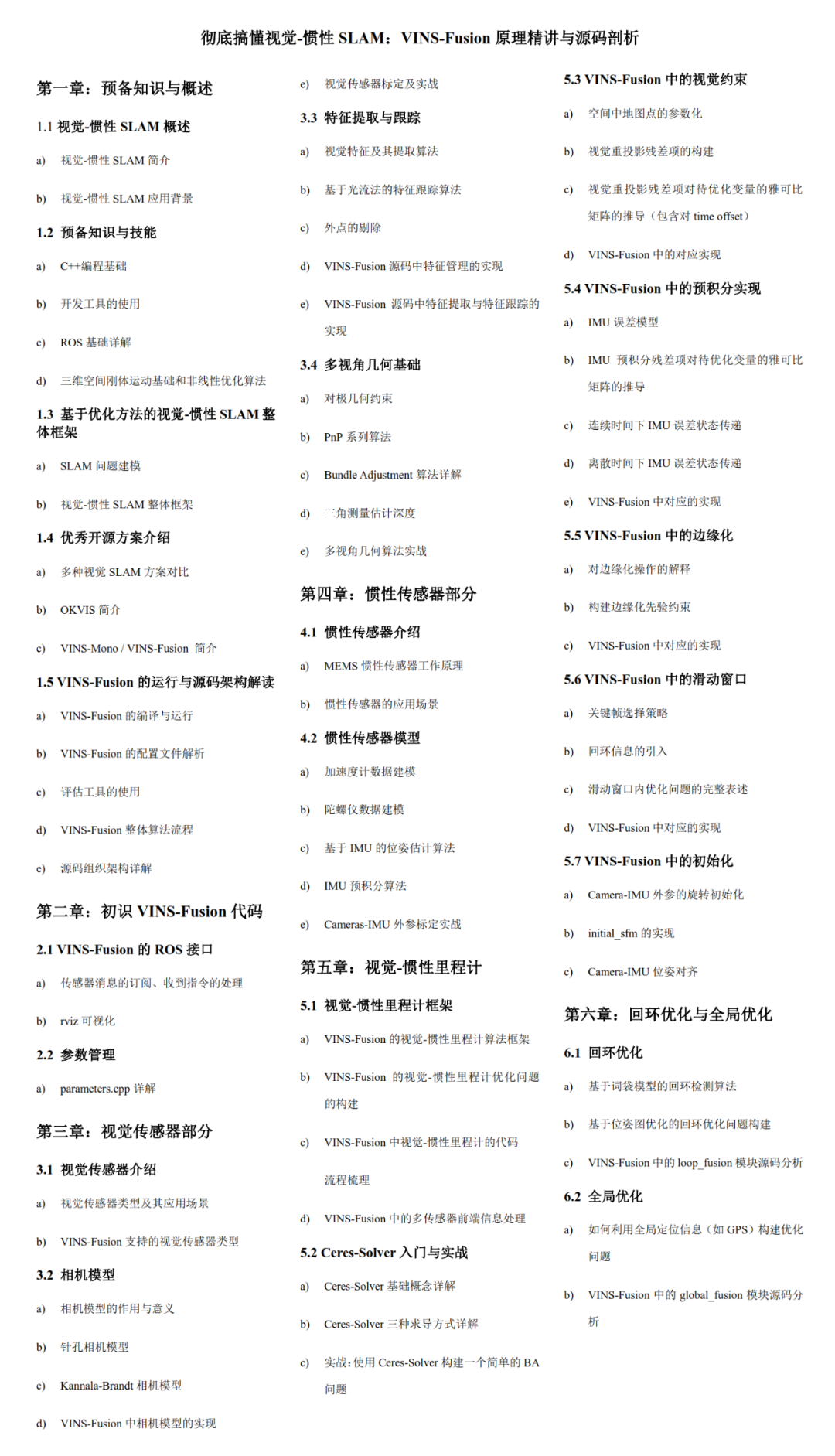
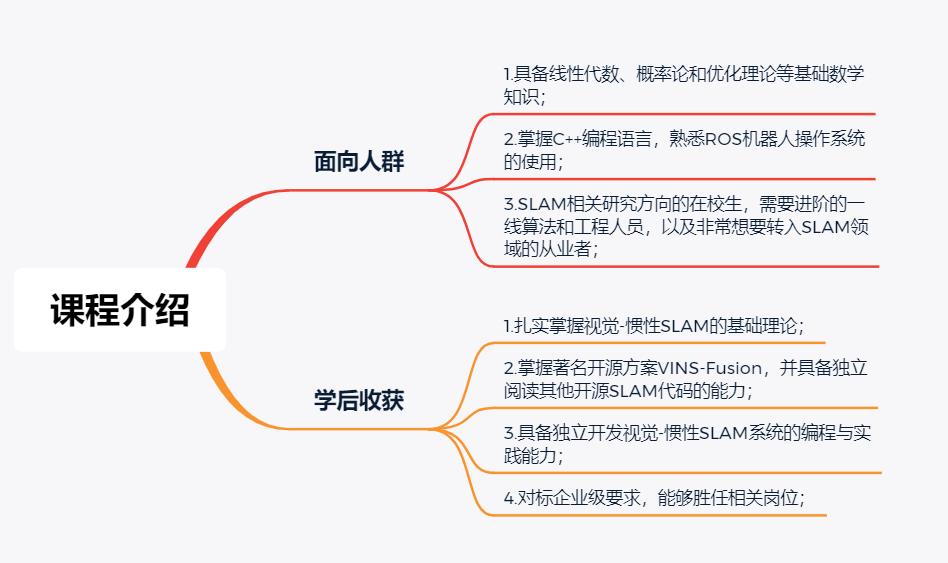
彻底搞懂视觉-惯性SLAM:VINS-Fusion原理精讲与源码剖析
Visual Odometry 榜单中排名最靠前的开源双目 VO
方案,主要支持:单目+IMU、纯双目、双目+IMU、双目+IMU+GPS,是一个可以用于室外场景中无人车辆/机器人自主定位的优秀方案。视觉-惯性SLAM所涉及的理论深度较深、覆盖面广,并对工程实践能力要求也较高,新手自学时相对比较困难。当下虽然有很多丰富的理论资料和优秀的相关开源项目,但是许多童鞋面对海量的理论资料、复杂的开源项目时可能无从下手,前期学习曲线过于陡峭,不得不放弃继续深入。为此,3D视觉工坊推出了《视觉-惯性SLAM的入门与实践》课程,结合VINS-Fusion源码,系统地对视觉-惯性SLAM的基础理论知识进行梳理。整套课程由一线算法工程师教授,从基础理论到代码剖析,保姆级教学,助力学员一步步从小白成长为大牛。
评论