
地图预测又不准了? DeepMind新GNN模型将谷歌地图预估到达准确率提升50%!

新智元报道
新智元报道
来源:DeepMind
编辑:小匀
【新智元导读】Google Maps是使用最广泛的地图app之一,其能预测交通情况的能力使其成为许多司机不可或缺的工具。近日,DeepMind宣布与其合作,帮助Google Maps变得更准确。
你是不是也经历过这样的故事?计划着和女友约会,按照地图预计的实时路况做准备,可是却往往不太准时……

眼看着上班就要迟到,明明显示会在10分钟后到达的公交车,并没有如期而至……

如果您是拼车服务的司机,地图还会获取接送时间信息,并依据此来估计价格。
全世界都有类似的烦恼。预估到达时间(ETA)准确率低,就是上述烦恼的原因。
ETA为什么低?
谷歌地图也有一套预测算法。但毕竟世界是动态的,每天的状况都有可能不同,特别是疫情期间。
例如,尽管上下班高峰时间都会发生在早上、晚上,但具体的确切时间可能每天、每月都有很大差异;一条小巷的拥堵,就会蔓延到下一个大路——这一点,地图往往无法实时监控;另外,道路质量、限速、事故和封路等因素,都会给预测模型带来麻烦。
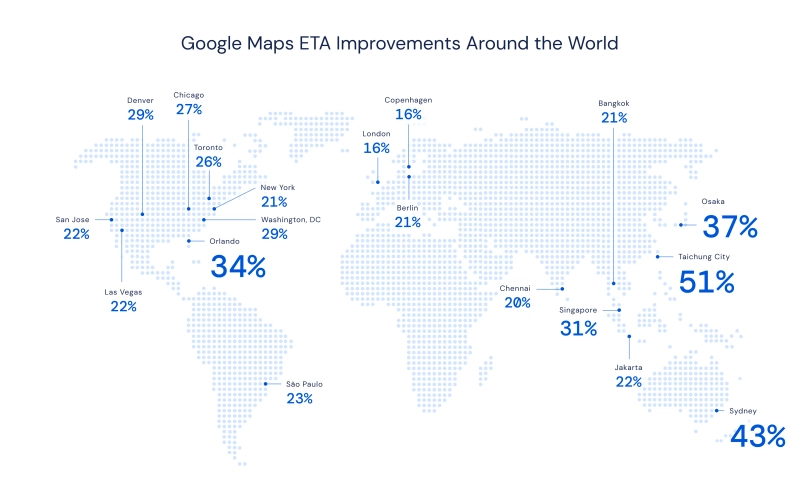
近日,DeepMind宣布帮「兄弟一把」——与谷歌地图展开合作,利用了一种图神经网络(GNN),成功提升了谷歌地图在柏林、东京、悉尼等大城市的实时 ETA 准确率,最高提升了50%。
DeepMind此次的研究,就是如何解决这个动态预测问题。
把道路划片处理
把道路划片处理
道路网(road network),指的是在一定区域内,由各种道路组成的相互联络、交织成网状分布的道路系统,类似下图这样:
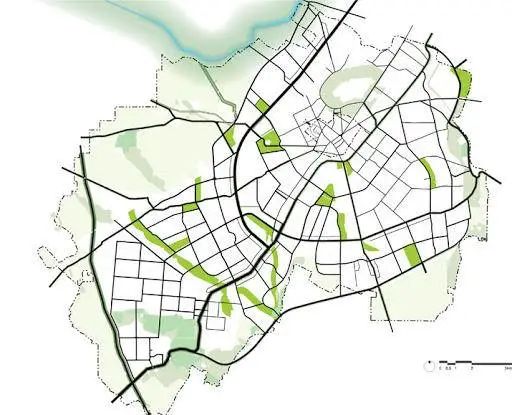
但这样的数据太庞大了,于是,谷歌地图将道路网划分为几个「超级路段」。超级路段就是指几个相邻的路段,因为这些路段的交通流会互相影响。
目前,谷歌Maps交通预测系统由以下部分组成:
(1)路由分析器,以构建超路段
(2)新GNN 模型,利用多个目标函数进行优化,能够预测每个超级路段的行程时间。
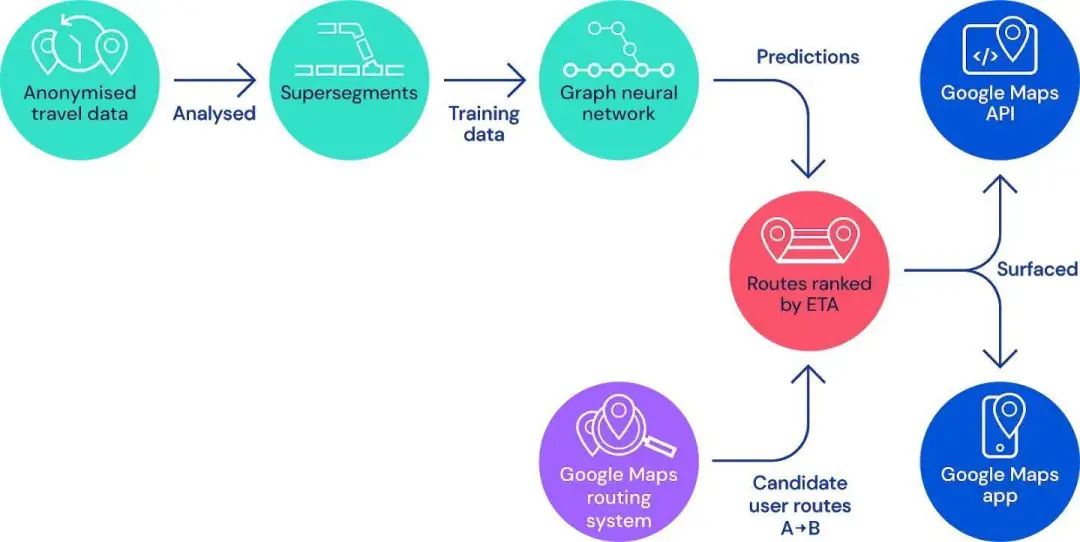
确定最优路线及其出行时间的模型架构
解决架构问题
研究人员要面对一个挑战:架构问题。
利用现有的交通系统,特别是已有的道路网分割和实时数据 pipeline,全连接神经网络模型表现良好。但是,每个超级路段都需要单独训练神经网络模型。
要想实现大规模部署,则必须训练数百万个这样的模型,这就对基础设施构成了巨大的挑战。
因此,该团队开始研究能够处理可变长度序列的模型,例如循环神经网络(RNN)。但是,向 RNN 添加来自道路网络的结构也不是容易的事。
最后,研究者决定用图神经网络。在对交通情况进行建模时,车辆如何穿过道路网络是该研究的关注点,而图神经网络可以对网络动态和信息传播进行建模。
该团队提出的模型将局部道路网络视为一个图,其中每个路段对应一个节点,连接两个路段(节点)的边要么在同一条道路上,要么通过交叉点(路口)连接。
在训练过程中动态调整图神经网络的学习速率,以使系统学习自己的最佳学习速率时间表。根据DeepMind的说法,通过在训练过程中自动调整学习率,该模型不仅表现优异,还学会了自动降低学习率。

实验表明,似乎范围越大,预测能力越强。例如,考虑小路上的拥堵状况对大路交通情况的影响。通过跨越多个交叉路口,该模型能够预测转弯处的延误、并道引起的延误,以及走走停停交通状况的通行时间。

但每个超级路段的长度和复杂度可能各有不同(从简单的两段路到包含了数百个节点的较长路径),但它们都可以使用同一个图神经网络模型进行处理。
DeepMind与谷歌地图团队的合作,延续了该实验室与谷歌产品部门的其他合作,包括努力改进谷歌Play Store的发现系统。除了谷歌,DeepMind还贡献了算法、框架和方法论来支持Waymo的自动驾驶系统。
参考链接:
https://venturebeat.com/2020/09/03/deepmind-claims-its-ai-improved-google-maps-travel-time-estimates-by-up-to-50/
https://deepmind.com/blog/article/traffic-prediction-with-advanced-graph-neural-networks

