
水下“老司机”!中科院自动化所研制的“全能选手”了解一下

大数据文摘授权转载自机器人大讲堂
自然界中,有一种鱼名叫(来跟我念)——豹鲂鮄[ fáng fú]。它们不仅长了“腿”,还长了“翅膀”,除了在水中遨游,还喜欢在海底爬行,它有着巨大的胸鳍,张开来就像穿了“高定”版的时装。

这硕大的胸鳍到底有啥用?

其实,区别于其他鱼类使用胸鳍划水、尾鳍扭进,鲂鮄采取的是伸展胸鳍的同时扭动尾鳍,驱动全身向前滑动的方式。
它们张开的硕大胸鳍,能减少前行需要的能量消耗。同时,在海底巡游的豹鲂鮄,不断调节胸鳍“翅膀”的展缩及角度,配合尾鳍的摆动,实现上升、下沉、左右平衡等多样的运动模式。
这么骨骼清奇的鱼,科学家们表示,不做个仿生机器人真是可惜了。于是,受豹鲂鮄运动方式的启发,中科院自动化所智能机器人系统团队面向水下观察、环境监测等任务,综合利用尾鳍推进推力大、机动性好和波动胸鳍推进模式运动稳定性好的优点,研制了兼具高速推进和低速稳定性能的仿生机器鱼RobDact。
针对RobDact特殊构型的建模问题,团队开展了其水动力建模与参数辨识研究,分别建立RobDact刚体动力模型与鱼鳍推力映射模型,从而构建出RobDact在不同运动状态下的水动力模型。
这项研究近期被发表在了由北京理工大学主办的Cyborg and Bionic Systems 期刊中。
水下“老司机”
RobDact是个身长70cm的机器版“豹鲂鮄”,拥有一对浅黄色半透明的波动长鳍和一个大功率双关节尾鳍↓↓↓
如果你有幸走进这个实验室,你或许能看到一条“乌漆嘛黑”的RobDact仿生机器鱼静静浮在水面,说不定还能感受一波科学家们每天“摸鱼”的工作日常~

传统的水下机器鱼主要靠尾鳍摆动进行运动,头部和身体会产生较大晃动,不便进行水下目标观测。
RobDact则不同,它依靠两侧鳍的上下左右摆动来调整位置,可以将要观察的目标定在视野当中,做到定点悬停,同时能兼顾速度和垂直、水平方向的位姿控制精度,具有较好的推进性能和低速姿态稳定控制的能力,可谓仿生鱼界的“全能选手”。
通俗易懂的说,能够定点悬停的RobDact,就像添加了防抖功能的相机!

揭秘RobDact设计原理
这个机器鱼是怎么游起来的呢?先来直观了解一下RobDact的系统配置。
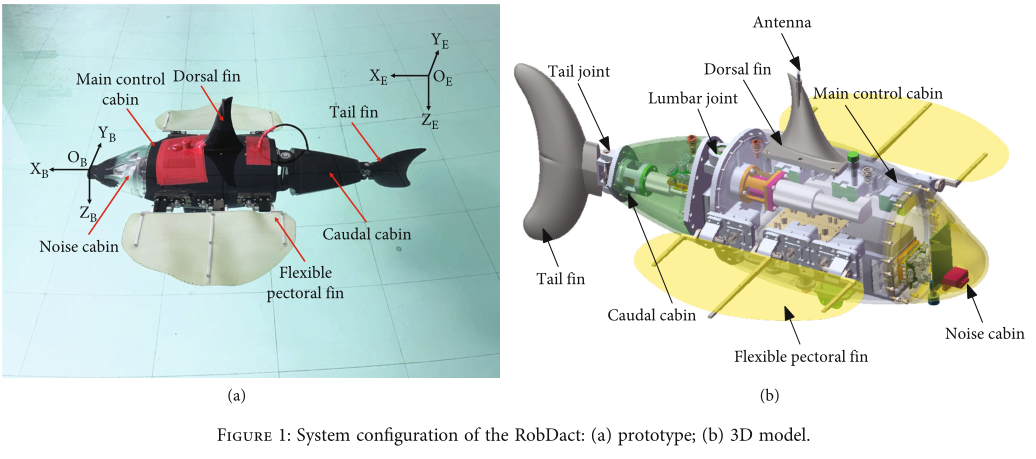
RobDact的系统配置:(a)原型机;(b)3D模型
RobDact由三个舱体和三个仿生鳍组成:前舱、主控制舱和尾舱。每个胸鳍都是一个波浪形的鳍,由三个鳍条组成,分别由舵机驱动,使RobDact获得更高的低速稳定性。主控制舱通过腰椎关节与尾舱相连,由200w直流电机供电。尾鳍通过关节连接到尾舱,并由一台90 W直流电动机提供动力。这就形成了一个多关节的尾巴,大大提高了RobDact的机动性。
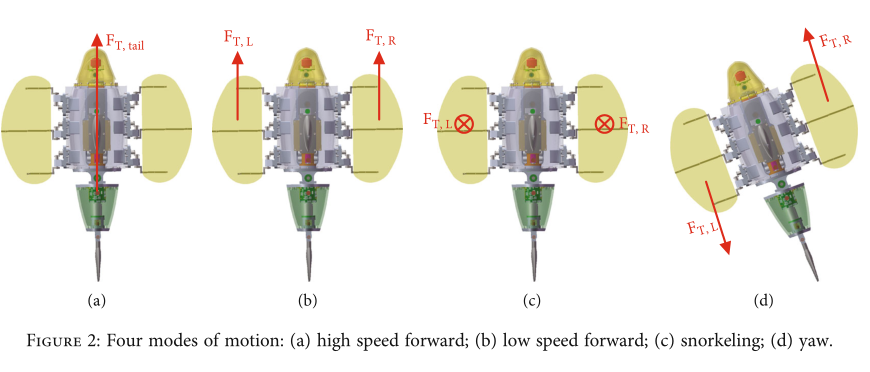
这条仿生机器鱼具有四种运动模式:低速前进、高速前进、偏航和浮潜。在不同运动模式下,胸鳍和尾鳍的摆动方式不同。
作为一条机器鱼,为实行精确的运动控制,对其进行水动力建模相当重要,研发团队是如何解决这个问题的呢?
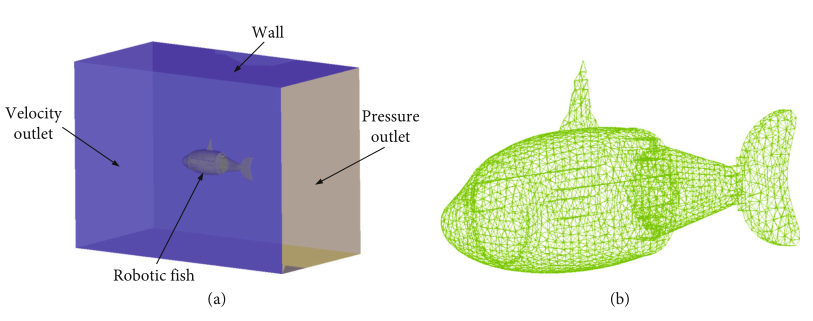
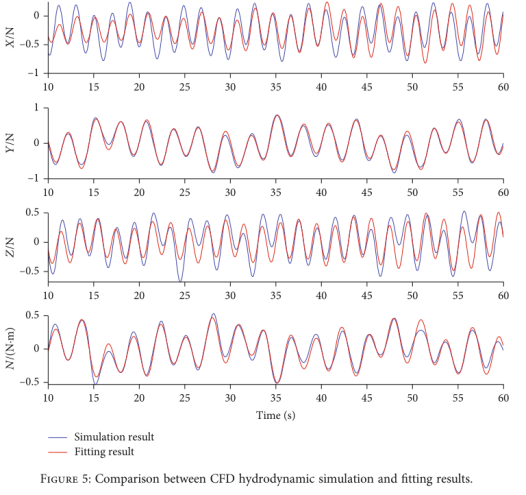
团队利用流体动力学和力矩方程建立了运动学和刚体动力学模型,利用CFD(计算流体动力学)模拟RobDact在不同速度下产生的水动力,进而识别水动力模型参数。
后来,为了建立胸鳍尾鳍波动参数与产生推力之间的关系,团队人员开发了一个力测量实验平台,并进行不同波动参数下推力测量实验,确定了RobDact鳍推力映射关系模型。最后,结合刚体动力学模型和鳍推力映射关系模型,建立了RobDact在不同运动模式下的水动力模型。
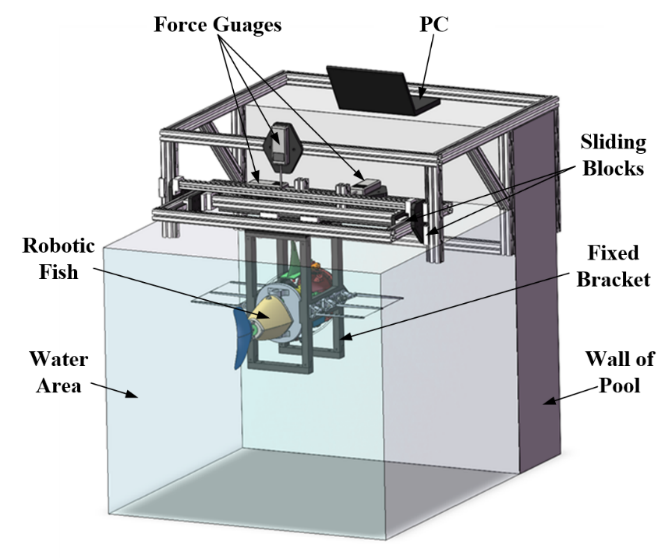
力测量实验平台. (a) 3D模型.
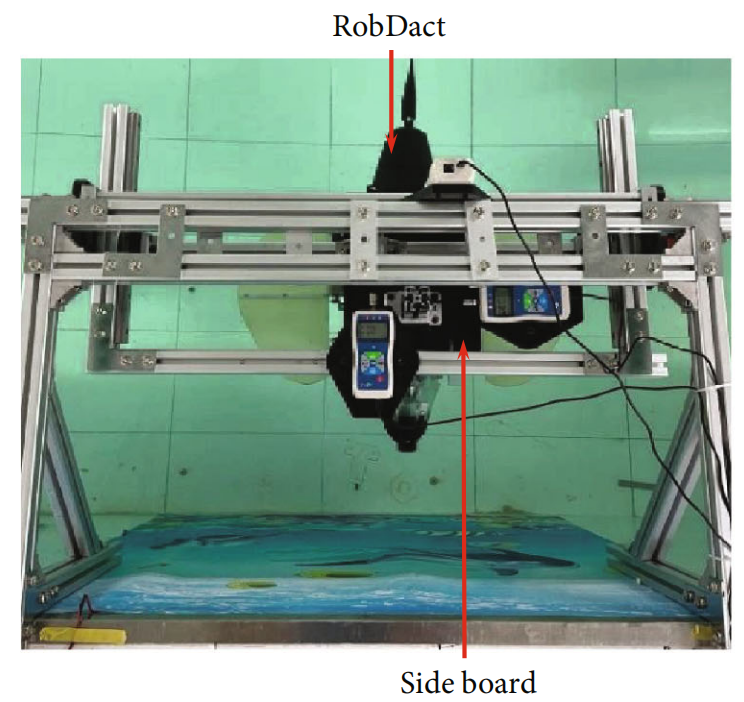
力测量实验平台. (b) 实物图.
未来将提高综合性能
目前,RobDact的设计载荷是两公斤,根据载荷的不同,可以实现对目标的识别、监测、躲避和抓取。这款机器鱼可通过遥控和带缆线水下作业两种方式工作,也可以事先给它定一个目标,让它在水下独立完成后浮出水面。
除了在水生态恢复调查和监测方面具有良好的应用前景,RobDact在狭窄或危险水下环境中作业,同样具有重要的研究价值。
在未来的工作中,团队研发人员们打算研究RobDact在水下的最大游泳速度与鳍产生的推力之间的关系,并由此对RobDact外形进行优化。并利用水动力模型结合强化学习等人工智能方法对仿生水下航行器进行智能控制,从而更好地提高综合性能。
引用信息:Qiyuan Cao, Rui Wang, Tiandong Zhang, Yu Wang, Shuo Wang, "Hydrodynamic Modeling and Parameter Identification of a Bionic Underwater Vehicle: RobDact", Cyborg and Bionic Systems, vol. 2022, Article ID 9806328,13pages,2022.https://doi.org/10.34133/2022/9806328
论文作者:

王睿,中科院自动化所副研究员,入选中国科协青年人才托举工程、北京市科技新星、中科院青促会会员。主要研究方向为仿生水下机器人,目前已发表SCI/EI检索的学术论文60余篇,其中IEEE Trans.系列汇刊论文19篇。申请国家发明专利23项,其中已授权9项。先后主持科技创新2030重大项目青年科学家项目、基础加强计划技术领域基金项目、中国电子学会-腾讯Robotics X犀牛鸟项目、北京市自然科学基金面上项目等科研项目。获水下机器人目标抓取大赛在线识别组一等奖、中科院优博、CAAI优博、CAA科普奖等奖励。
