
从头开始编写一个时间序列数据库
作者 | Ryo Nakao
译者 | 王雪迎 责编 | 张红月
出品 | CSDN(ID:CSDNnews)
本文翻译自Ryo Nakao 的个人博客(https://corecursive.com/066-sqlite-with-richard-hipp/)主要告诉大家如何实现一个时间序列数据库引擎。它是作者的经验之谈,是我在从头开始编写一个轻量级时间序列数据库引擎中所学到的。
虽然本引擎用Go语言编写,但文中所涉及的绝大部分内容与编程语言无关。
动机
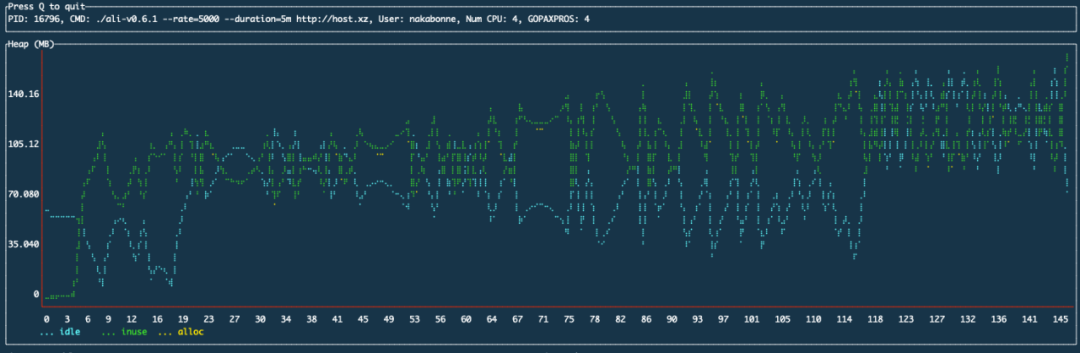
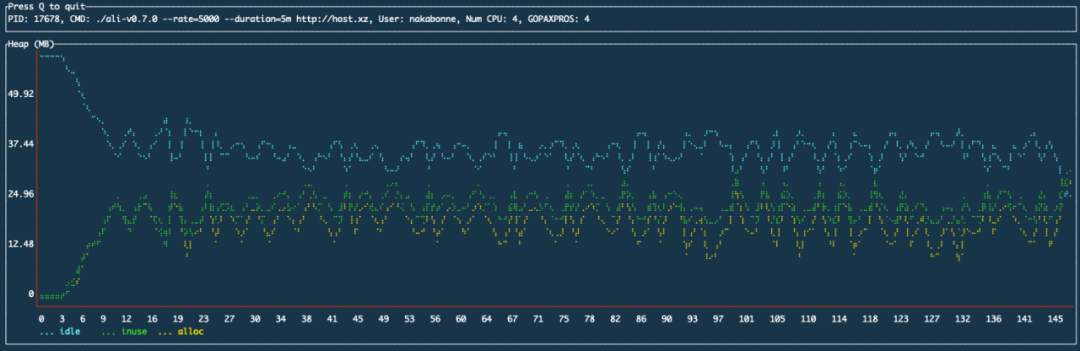
我一直在研究一些处理海量时间序列数据的工具。其中之一名为Ali(https://github.com/nakabonne/ali),是一个负载测试工具,可以在客户端实时绘制度量值。它请求执行特定的查询,并将每个查询的结果,如延迟或任何其它度量,进行无休止地写入。换句话说,这有点像在一台主机上创建一个带有简单查询功能的推送监视系统。
在以前的实现中,它只是将数据点追加到堆上的变长数组中。这种做法自然会导致一个问题,即随着时间的推移,内存使用量将不断增加:
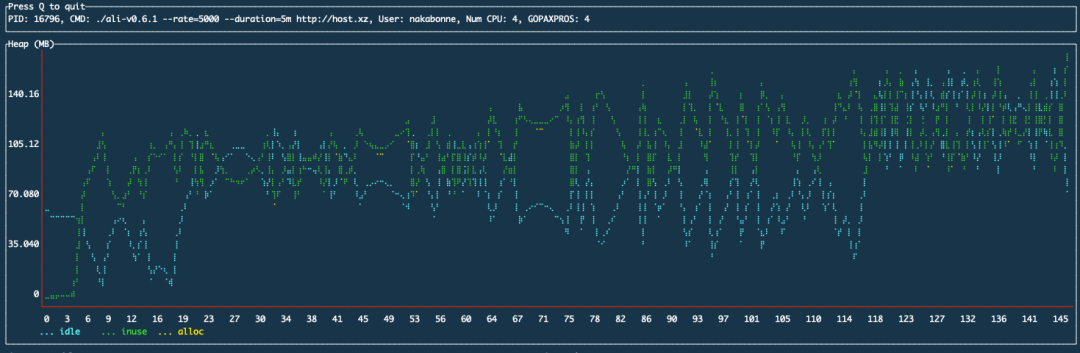
由nakabonne/gosivy测量的Ali堆使用量
为了解决这个问题,我尝试开发了一个存储引擎,可以被用作Go程序库。
时间序列数据的特征
我们首先要了解时间序列数据,以便理清需要解决的问题。
时间序列数据是具有时间戳的多个值的集合。它一般被用于观察随时间变化的数据。每个时间序列数据都被称为数据点,通常表示为一个带有时间戳和值的元组。时间序列数据具有以下特征:
1.数据量巨大
由于时间序列数据的性质,单个数据点很少有意义,只有在收集了大量数据之后,它才会变得有效。在金融行业里,数据捕获要求超过1000000/s次的情况并不少见,因为数据通常是在短时间内写入的。
在Ali的用例中,用户指定的请求速率与写性能需求直接相关(尽管文件描述符数量的上限基本上是瓶颈)。
为了处理海量数据,我们需要集中精力尽量优化数据写入过程,还需要尽可能减少磁盘空间的消耗。
2.只追加
每个数据点都是不变的。而且,通常会对较老的数据执行批量删除操作,而不指定特定数据点。
3.按时间排序
由于数据按时间戳排序存储,因此可以将其视为已按时间索引。利用这一性质你可以在没有任何开销的情况下建立索引。
4.批量访问
在读出数据时,主要是通过指定一个时间段来检索具有连续时间戳的多个数据点。你可以利用此特性来提升数据读取时的局部性。
5.最近优先
在许多用例中,我们倾向于读取和使用最近的数据点。这可能会影响缓存算法的选择。
6.高基数
时间序列数据往往具有更高的基数。例如,在系统监控环境中尤其如此。云原生时代,我们得到了更多的机会来监控动态变化的主机和网络等环境。
从这个意义上说,几乎没有完全相同的度量标准;为每个度量创建一个文件将导致各种问题,例如inode限制。
现有解决方案
总体来说,我们发现对时间序列数据的操作是写密集型,并且很多情况下是在一个时间范围内顺序读/写数据。
Google的LevelDB是一个众所周知的键-值存储引擎,并已发布了一些Go语言的实现。LevelDB是基于LSM树实现的,它只对尾部进行顺序写入,适用于只追加的时间序列数据。按键排序也使它适合于基于时间戳的时间序列数据。事实上,早期的Prometheus和InfluxDB存储引擎也是基于LevelDB的。
然而有一些东西被浪费了。我们将在后面看到,时间序列数据是单向的,可以利用此特性将其编码成更小的尺寸。我们希望利用这一点,因为要处理的是海量的时间序列数据。
另外,由于所有数据点都是不可变的,无需更新过程,因此所有写操作都可以按顺序进行。尽管如此,我还是有点担心,在执行诸如合并SSTables等操作时会发生写放大。
tstorage
有鉴于此,我决定自己编写一个数据库引擎库,命名为tstorage。
它是一个使用本地磁盘的轻量级引擎,完全用纯Go语言编写。
本文介绍了我是如何实现tstorage的,并解释了创建它所需的知识。
什么是数据库引擎
典型的DBMS处理来自客户端的请求,并控制节点之间的通信以进行集群。它还解析查询,制定执行计划,并根据这些计划从磁盘读/写数据。数据库引擎是只执行最后读/写部分的组件,也是下图中存储引擎的一部分。
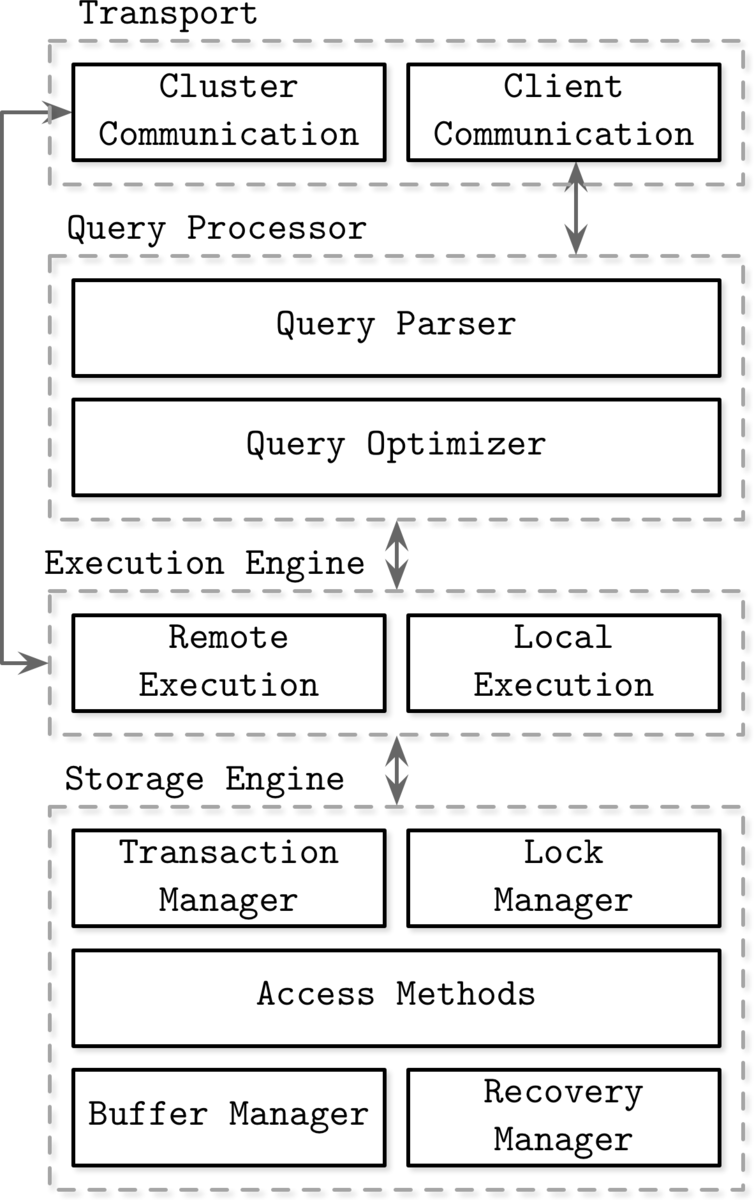
数据库内部结构,Alex Petrov,2019,第1章,图1-1。数据库管理系统架构
数据库引擎对磁盘/内存上的数据结构进行抽象,为图中所示的执行引擎提供API,并提供了事务和恢复功能。
数据模型
基于这些特性,tstorage采用了一种按时间划分数据点的线性数据模型结构。每个分区充当一个完全独立的数据库,包含其时间范围内的所有数据点。
│ │Read Write│ ││ V│ ┌───────────────────┐ max: 1600010800├─────> Memory Partition│ └───────────────────┘ min: 1600007201││ ┌───────────────────┐ max: 1600007200├─────> Memory Partition│ └───────────────────┘ min: 1600003601││ ┌───────────────────┐ max: 1600003600└─────> Disk Partition└───────────────────┘ min: 1600000000
受LSM树的轻微影响,Prometheus的V3存储也使用了一种非常近似的模型
只有头和下一个分区在堆上并且是可写的。这称为内存分区。在内存分区中,数据在写入之前会先被追加到预写日志的末尾,以防止数据丢失(如果不需要这样的持久性,可以将其关闭)。
旧分区会写入磁盘上的单个文件。这称为磁盘分区,是只读的。写入磁盘的文件通过mmap(2)内核透明地缓存,后面将解释这点。
你可以为分区设置一个时间段,在这段时间之后,新的内存分区将被自动添加到堆头,旧的内存分区将被刷新到磁盘。
这种模式有许多优点。首先,读取时可以完全忽略指定范围之外的分区。这种尽可能缩小搜索范围的想法,是受到了LevelDB中使用的布隆过滤器的启发。另外,因为最新的数据点缓存在堆中,所以大多数都能被快速读取。
除此之外,由于tstorage被设计成将一个分区写入一个文件:
所有的写操作都只能追加,而不会发生任何写放大,因为它只按顺序写入一个文件。
文件的数量不依赖于基数(度量类型的数量)。
如前所述,读取操作通常指定一个时间段并获取相邻的数据点,因此提升了局部性。
以下部分描述每种分区实现中的关键点。
内存分区
1.数据点列表
数据点列表被表示为堆上的一个数组(从技术上讲,它有点像Go语言中指向名为Slice的基数组的指针列表)。这是一个包含无限多个要写入的数据点的列表,因此乍一看,链表似乎是最佳选择,因为它能使用O(1)复杂度添加元素。然而,内存中元素相邻排列的数组将受益于高速缓存的空间局部性。此外,由于时间序列数据总是预先排序的,因此可以很容易地实现二分搜索等经典搜索算法。
2.无序数据点
在实际应用中,由于网络延迟或时钟同步等问题,数据点出现无序的情况并不少见。写入时应考虑到这一点,分区中的数据点应始终保持有序。
但是要注意,在将数据点作为数组进行管理时,每次写入都需要应用一个独占锁。我们必须考虑一种很酷的方法来接收它们,这样就不必延长锁定时间来容纳无序的数据点。
无序数据点可以分为两种情况:一是它们在要写入的分区范围内无序;第二种情况是数据点超出了首先尝试写入的分区的范围。
如果写入的数据点对应于第一种情况,我们将先在一个单独的数组中无序地缓存数据点。然后,在刷新到磁盘时,数据点与内存分区中的数据点合并并重新排序。
在数据模型部分,我提到堆上只有头部及其下一个分区,以适应第二种情况:在头部添加新分区之后,可能会立即写入跨分区的数据点。这是为了解决第二种情况。通过使最近的两个分区保持可写状态,我们可以避免这些数据点被丢弃。
3.预写日志(WAL)
内存分区使用易失性存储,因此有可能由于突然崩溃或掉电而导致数据丢失。为了应对这个问题,内存分区首先将操作日志写入预写日志(WAL)。在发生崩溃的情况下,你可以通过执行从日志开头到结尾写入的操作进行恢复。
对于支持磁盘上数据更新操作的数据库引擎,WAL必须执行非常低级别的操作:要完全恢复更新所做的处理,必须准确地存储哪个磁盘块中的哪个字节被更改,等等。
但是,时间序列数据是只追加的,tstorage会将所有磁盘分区都置为只读。它只需要附加有关哪些数据点已被写入内存分区的高级信息,这样就可以用简单且与磁盘无关的格式来恢复它们。
磁盘分区
理解磁盘分区的最快方法是查看文件系统上的宏布局。
如下所示,每个分区使用一个目录,其下面是元数据和实际的压缩数据。这是普罗米修斯布局的简化版本,所以你以前可能见过类似的结构。
$ tree ./data./data├── p-1600000001-1600003600│ ├── data│ └── meta.json├── p-1600003601-1600007200│ ├── data│ └── meta.json└── p-1600007201-1600010800├── data└── meta.json
我将按照数据->元数据的顺序来描述实现点。
1.内存映射数据
如上所述,分区中的所有数据点都被写入一个文件。tstorage采用以下格式。
┌────────────┐│ 度量-1 │度量-2 ││────────────││ 度量-3 │ ││────┘ ││ 度量-4 ││────────────││ 度量-5 │ 度量-6 ││────────────││ 度量-7 │ ││──────────┘ ││ 度量-8 ││────────────││度量-9│ 度量-10 │└────────────┘文件格式
度量-1~度量-10分别表示度量的数据点列表
回忆一下时间序列数据的特征。数据点是不可变的,而且大多数情况下,度量是通过指定一个范围来批量获取的。因此,我们可以通过按度量对数据点进行分组来提高局部性。
这个文件通过mmap(2)中的内核透明地缓存。这使得我们可以缓存文件而不将其复制到用户空间。这个方法非常有效,因为我最初的动机就是解决Ali随着时间的推移吃光堆的问题。
内存映射文件可以被Go程序以[]bytes形式访问,就像堆上的一个字节字符串一样。
type diskPartition struct {// file descriptor of data filef *os.File// memory-mapped file backed by fmappedFile []byte
现在,我们如何搜索这个自包含的字节序列呢?将它复制到堆上,并在Go程序中对其解码为数据结构是很容易的,但这达不到内存映射的目标。反正,我们需要一个索引结构来有效地访问编码数据。接下来介绍的元数据用于此目的。
2.元数据
元数据的内容如下所示。一个分区只有一个元数据,这就是为什么采用JSON格式,虽然有点多余,但很容易通过编程进行处理。
$ cat ./data/p-1600000001-1600003600/meta.json{"minTimestamp": 1600000001,"maxTimestamp": 1600003600,"numDataPoints": 7200,"metrics": {"metric-1": {"name": "metric-1","offset": 0,"minTimestamp": 1600000001,"maxTimestamp": 1600003600,"numDataPoints": 3600},"metric-2": {"name": "metric-2","offset": 36014,"minTimestamp": 1600000001,"maxTimestamp": 1600003600,"numDataPoints": 3600}}}
元数据用于在分区中构建索引。这是存储每个度量的文件内偏移量和字节大小的地方,只有这些元数据才能进入堆。通过这些信息,tstorage尝试随机访问映射到内核空间的数据。类似于:
{"minTimestamp": 1600000001,"maxTimestamp": 1600003600,"numDataPoints": 7200,"metrics": {"metric-1": {"name": "metric-1",┌───── "offset": 0,│ "minTimestamp": 1600000001,│ "maxTimestamp": 1600003600,│ "numDataPoints": 3600│ },│ "metric-2": {│ "name": "metric-2",│ "offset": 36014, ────────────┐│ "minTimestamp": 1600000001, ││ "maxTimestamp": 1600003600, ││ "numDataPoints": 3600 ││ } ││ } ││ } ┌───────────────────┘│ │V V0 36014┌───────────────────────────┐│ Metric-1 │ Metric-2 ││───────────────────────────││ Metric-3 │ ││──────────┘ ││ Metric-4 ││───────────────────────────││ Metric-5 │ Metric-6 ││───────────────────────────││ Metric-7 │ ││───────────────────────┘ ││ Metric-8 ││───────────────────────────││Metric-9│ Metric-10 │└───────────────────────────┘
为了存储每个度量的起始偏移量,我们需要在刷新到磁盘时将其持久化。即对每个度量的数据点列表进行编码,并在构建索引时将偏移量写入元数据文件。
编码
如前所述,时间序列数据通常由时间戳和值的元组表示,这就可以将其巧妙地编码为非常小的尺寸。
2015年,Facebook发表了一篇名为Gorilla:一个快速、可伸缩的内存时间序列数据库的论文,他们在其中引入了一种利用时间序列数据特征的编码方式。当前许多主流的时间序列数据库都基于这种编码方式,而tstorage也是如此。
时间戳和值使用不同的方法进行编码。首先,tstorage中的UNIX时间戳表示为一个无符号的64位整数。由于该时间戳趋向于单调递增,仅存储与先前值差异的编码方法是有效的。因此,使用Delta-of-delta编码。
此外,tstorage中的值表示为有符号的64位浮点类型。该值使用XOR编码,因为它倾向于保持接近这个值,尽管它不可能单调地增加或减少。
我将解释每种编码方式。
1.Delta编码
Delta-of-Delta编码是一种利用Delta编码的方法,因此我将先解释一下Delta编码。
Delta编码只写入上一个数字和当前数字之间的差异。
例如,假设第一个时间戳是160000000。如果后面写入1600000060->160000120->160000181,则增量分别为60、60、61。
时间戳 | 增量 |
160000000 | - |
160000060 | 60 |
160000120 | 60 |
160000181 | 61 |
只将这些增量值按顺序写入文件。解码时,只需按顺序应用增量值,就可以恢复原始值。
2.Delta-of-delta编码
即使使用delta编码,一些可变长度的编码结果也可以足够小。然而,时间序列数据的时间戳通常具有固定的间隔,并且增量值本身很可能彼此接近。因此,利用这个增量值的增量值可以节省更多。这个增量值的增量值叫做delta-of-delta。
我们取上例时间戳的delta-of-delta。
时间戳 | 增量 | 增量的增量 |
1600000000 | - | - |
1600000060 | 60 | - |
1600000120 | 60 | 0 |
1600000181 | 61 | 1 |
对于第一个时间戳,由于无法计算增量值,我们按原样写入160000000。根据论文,Gorilla使用固定长度编码来编码数据,而tstorage使用一种称为Variants的可变长度编码方法。
对于第二个时间戳,因为delta-of-delta还无法计算,所以我们按原样写增量值60。因为Gorilla假设每4小时(=16384秒)创建一个时间序列数据块,可以获取的最大位数是14位,所以它用14位的固定长度进行编码。然而,tstorage使用Variants进行可变长度编码(Prometheus也使用Variants编码前两个时间戳,我实在不知道为什么Gorilla使用固定长度)。
如果你有兴趣了解更多Variants的工作原理,请查看我的上一篇文章:https://nakabonne.dev/posts/binary-encoding-go/#how-varints-works
delta-of-delta使用可变长度编码进行编码,因此它的大小取决于要写入的数字的大小。如果delta-of-delta为0,则使用1位写入0。如果delta-of-delta在64~64范围内,则使用2位写入1和0,然后使用7位写入delta-of-delta。
所以每个时间戳的大小是:
时间戳 | 增量 | 增量的增量 | 长度 |
1600000000 | - | - | 40位 |
1600000060 | 60 | - | 8位 |
160000120 | 60 | 0 | 1位 |
16000018 | 60 | 1 | 9位 |
总大小为40+8+1+9=58位。
如果我们对原始的四个时间戳进行定长编码,则得到64 x 4=256位;可以看到我们节省了很多尺寸。
如你所见,如果时间戳以固定的间隔排列,那么delta-of-delta将始终为零,这使得编码非常高效。如果想保持尽可能小的尺寸,你应该尝试以固定周期写入数据点。
如果想更详细地了解它,我建议你阅读论文的4.1.1压缩时间戳。
3.XOR编码
XOR编码是一种对两个浮点值进行异或运算,并将其代替实际值写入的方法。
如果取接近值的异或,前导零和尾部零往往更多,而我们希望可以忽略要写入的大小。例如,如果我们取2.0和3.0的异或:
2.0 ^ 3.0 = 0000000000001000000000000000000000000000000000000000000000000000└leading 0s┘ └ trailing 0s ┘
正如你所看到的,异或结果分为三个部分:
前导零(12位) 1(1位) 尾部零(51位)
如果与前一个值相同的异或
如果与前一个值不同的异或
如果有意义位与前一个值的不同
原文:https://corecursive.com/066-sqlite-with-richard-hipp/
https://misfra.me/state-of-the-state-part-iii https://fabxc.org/tsdb/ https://questdb.io/blog/2020/11/26/why-timeseries-data http://www.vldb.org/pvldb/vol8/p1816-teller.pdf https://blog.timescale.com/blog/time-series-compression-algorithms-explained
- EOF -
回复关键字“简明python ”,立即获取入门必备书籍《简明python教程》电子版
回复关键字“爬虫”,立即获取爬虫学习资料

推荐