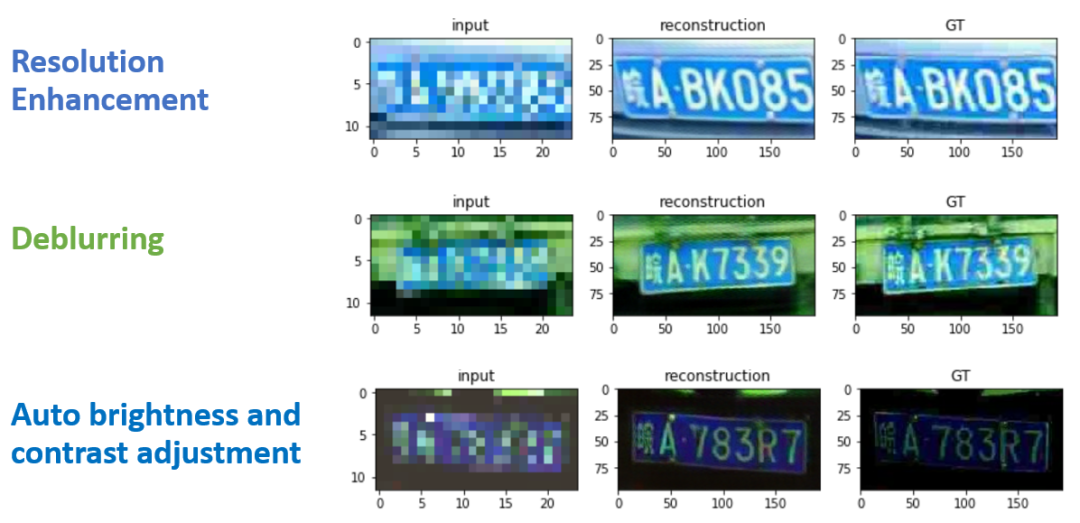
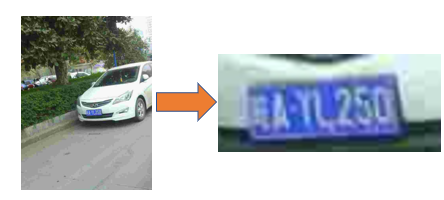
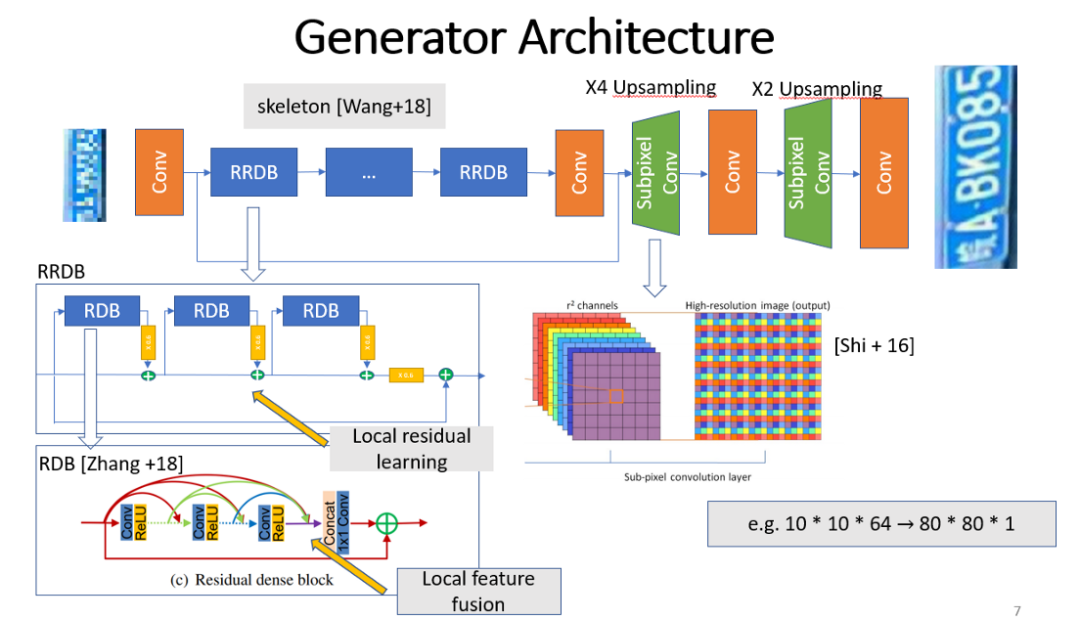
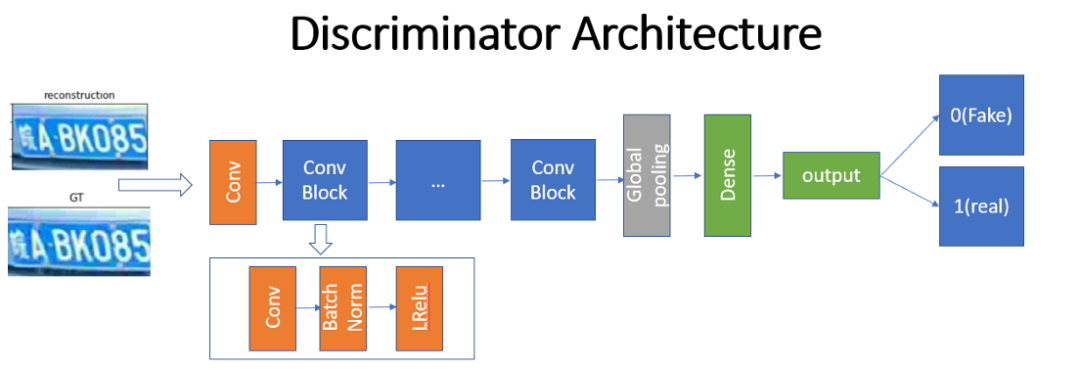
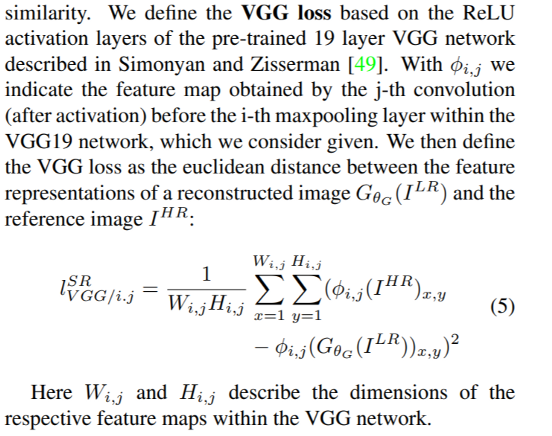
使用Python+OpenCV+GAN实现车牌图像增强小白学视觉关注共 1693字,需浏览 4分钟 ·2020-07-28 16:44 点击上方“AI小白学视觉”,选择加"星标"或“置顶”重磅干货,第一时间送达本文转载自:深度学习与计算机视觉在好莱坞的犯罪电影中,我们经常看到侦探们在电脑高手的帮助下进行破案,他们可以从模糊、低质量的图像中发现隐藏的信息。在技术上,电影中的黑魔法被称为(SISR)在各种SISR应用中,汽车牌照的超分辨率以其巨大的潜力绝对是名列前茅的。例如,它可以用于执法,还可用于提高车牌识别和街道识别(地图服务)的准确性。在本文中,将介绍在Python中实现的车牌图像增强。Jupyter notebook教程可以在此处(https://github.com/zzxvictor/License-super-resolution) 找到。展示在深入探讨模型体系结构和训练策略细节之前,向你展示一下模型的能力:我们在逃逸事故案例中发现一个问题:车牌是在黑暗条件下由低质量摄像头拍摄的,而我们的模型不仅可以提高分辨率,还可以通过对图像进行去噪、调整亮度和对比度来增强车牌号的易读性。系统架构预处理我们在本项目中使用的数据集为中国城市停车场数据集(https://github.com/detectRecog/CCPD) ,它包含了200k+个不同条件下的汽车图像,然而原始数据不能被直接使用,但是我们只需要车牌图像而不是街景和汽车,因此第一步是使用数据集提供的注释从图像中裁剪出车牌图像。我们还过滤掉亮度和对比度差的图像,只保留好的部分作为标签。我们人工生成车牌图像数据(input,label),其中输入经过降采样和噪声、同时随机进行亮度和对比度的破坏,而标签不变。模型详细信息我们的模型受ESRGAN模型(https://arxiv.org/abs/1809.00219) 的启发。顾名思义,我们的模型是在对抗性的方式下进行训练的——生成器和鉴别器相互对抗。生成器我们的生成器是建立在两个最先进的模型之上的——在ESRGAN的RRDB网络和残差密集网络。生成器使用亚像素卷积(在tensorflow中称为tf.depth_to_space,在Pythorch中称为Pixel Shuffle)在低分辨率图像上进行8倍采样。基本上,亚像素卷积的作用是将一个大小为10 x 10 x 64的特征映射压缩到另一个深度较浅的较大特征映射(如果上采样率为8,则为80 x 80 x 1)。鉴别器鉴别器是一个简单的VGG风格的网络,输出0(假)或1(真),理想情况下,鉴别器应该能够区分重建图像和真实图像。添加一个鉴别器比使用一个最小化均方误差的生成器得到的效果更好,后者倾向于创建与合法字母完全不同的过度平滑伪影。使用鉴别器约束输出空间有助于创建类似字母的重构。损失函数与评估车牌图像重建的一个问题在于均方误差或峰值信噪比等常用指标在描述高层特征方面并不特别擅长。例如,模糊重建可能比具有偏移亮度和高对比度的重建获得更高的PSNR。因此,重点关注边缘和字母方向等高级特征是非常重要的。在SRGAN的论文中,研究者们发现了一个新的内容损失函数,该函数计算VGG网络的特征空间中的均方误差,它突出了原始图像的特征,而不是图像空间中的均方误差。他们将VGG损失定义为我们的模型经过优化,以最小化VGG损失和MSE(称为内容损失)的混合:内容丢失迫使模型在重建时注意边缘,以确保高层骨架与真实值相匹配。结束就这样!如你所见,重建车牌并不难!如果你对模型的详细实现感兴趣,请查看我们在Github上的存储库!https://github.com/zzxector/License-super-resolution原文链接:https://towardsdatascience.com/license-plate-image-enhancement-5a170475bec1 浏览 191点赞 评论 收藏 分享 手机扫一扫分享分享 举报 评论图片表情视频评价全部评论推荐 如何使用OpenCV实现图像均衡???目标检测与深度学习0传统图像处理——图像增强ALTM(亮度增强)AI算法与图像处理0imgaug机器学习图像增强imgaug 是一个用于机器学习实验中图像增强的库。它支持广泛的增强技术,允许轻松组合这些技术并以随imgaug机器学习图像增强imgaug是一个用于机器学习实验中图像增强的库。它支持广泛的增强技术,允许轻松组合这些技术并以随机顺序或在多个CPU内核上执行它们;具有简单而强大的随机界面,不仅可以增强图像,还可以增强关键点/地标使用 Cilium 增强 Kubernetes 网络安全云原生实验室0ImageAI使用 Python 快速简单实现图像内容预测ImageAI是一个 python 库,旨在使开发人员能够使用简单的几行代码构建具有包含深度学习和计ImageAI使用 Python 快速简单实现图像内容预测ImageAI是一个python库,旨在使开发人员能够使用简单的几行代码构建具有包含深度学习和计算机视觉功能的应用程序和系统。这个 AICommons 项目https://commons.specpaFacebook推出图像增强库:AuglyAI算法与图像处理0LabVIEW OCR 实现车牌识别(实战篇—3)美男子玩编程0LabVIEW OCR 实现车牌识别(实战篇—3)美男子玩编程0点赞 评论 收藏 分享 手机扫一扫分享分享 举报






 下载APP
下载APP