
单片机的Bootloader,可以实现用户轻松升级程序

01
什么是Bootloader
02
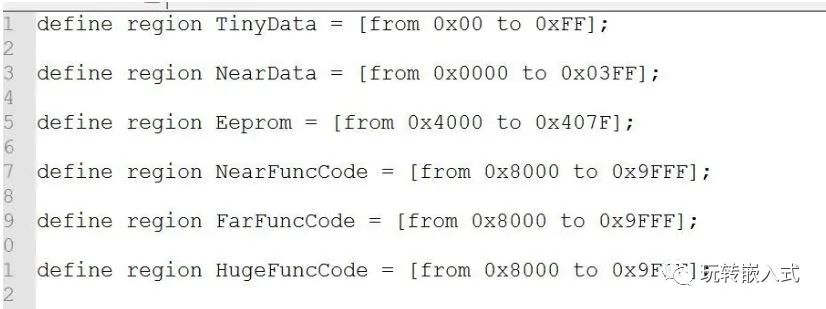
划分Flash区间
03
修改中断向量表
__root const long reintvec[]@".intvec"=
{
0x82008080,0x82008404,0x82008408,0x8200840c,
0x82008410,0x82008414,0x82008418,0x8200841c,
0x82008420,0x82008424,0x82008428,0x8200842c,
0x82008430,0x82008434,0x82008438,0x8200843c,
0x82008440,0x82008444,0x82008448,0x8200844c,
0x82008450,0x82008454,0x82008458,0x8200845c,
0x82008460,0x82008464,0x82008468,0x8200846c,
0x82008470,0x82008474,0x82008478,0x8200847c,
};
__root const long reintvec[]@".intvec"=
{
0x82008080,0x82009404,0x82009408,0x8200940c,
0x82009010,0x82009014,0x82009018,0x8200901c,
0x82009020,0x82009024,0x82009028,0x8200902c,
0x82009030,0x82009034,0x82009038,0x8200903c,
0x82009040,0x82009044,0x82009048,0x8200904c,
0x82009050,0x82009054,0x82009058,0x8200905c,
0x82009060,0x82009064,0x82009068,0x8200906c,
0x82009070,0x82009074,0x82009078,0x8200907c,
};
04
修改ICF文件
define region NearFuncCode = [from 0x8000 to 0x8FFF];
define block INTVEC with size = 0x80 { ro section .intvec };
place at start of NearFuncCode { block INTVEC };
05
跳转命令
asm("LDW X, SP ");
asm("LD A, $FF");
asm("LD XL, A ");
asm("LDW SP, X ");
asm("JPF $9000");
sm("LDW X, SP ");
asm("LD A, $FF");
asm("LD XL, A ");
asm("LDW SP, X ");
asm("JPF $8000");06
编写交互代码

评论