
北京大学发表最新综述!盘点最先进的仿生肢体意图识别技术

大数据文摘授权转载自机器人大讲堂
提到“义肢”,你可能会想到给失去手臂或腿脚的人装的假肢。
随着科技的发展,“义肢”早已不断进化,现在它有了新的名字——仿生肢体。
从英文组词的构成来解释,仿生Bionic =生物Biology +电子Electronics,仿生肢体不是一个被动的假体,它将生物学原理、传感器技术、人工智能和驱动装置技术应用到假肢上,成为会思考的、人体的一部分。

人们最理想的,当然是仿生肢体能变得和原来的身体一样行动,而能让残障人士产生真实感受、并自如地控制仿生肢体的一项重要技术就是运动意图识别与技术。
想知道目前仿生肢体研究中涉及到的运动意图控识别发展情况吗?
关于运动意图识别
北京大学工学院机器人研究小组最近在Cyborg and Bionic Systems 期刊上发表了一篇论文,专门就仿生下肢中最先进的运动意图识别技术进行了综述,包括目前运动意图识别的研究现状、方法、进展、挑战以及未来前景等。

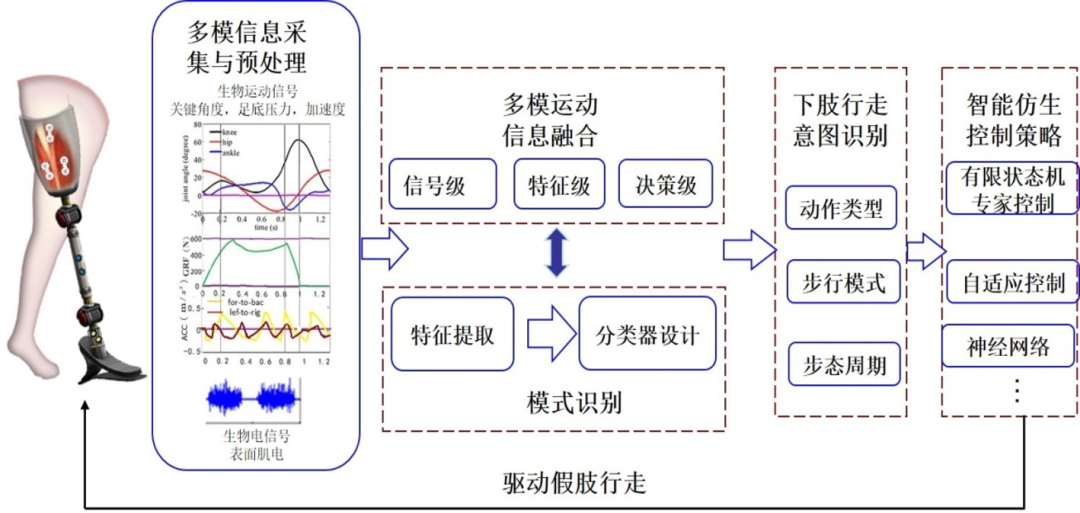
人的运动涉及人、仿生肢体和环境之间的交互。运动意图识别是通过处理来自残肢的肌肉信号与仿生肢体的传感信号等,从而解码人的运动情况的一种技术。运动意图识别是实现仿生肢体控制的基础和前提。
对于仿生下肢来说,它需要模拟患者缺失关节的生物力学,而不同关节的运动学和动力学在不同的运动模式下差异很大,因此,要想自如地控制仿生肢体,首先要识别人类的运动意图,意图识别主要包括:运动模式识别、步态事件检测和连续的步态相位估计等,接下来我们每个都展开说说。
运动模式识别
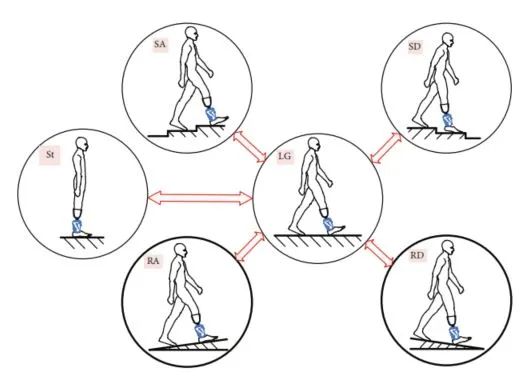
下肢仿生肢体穿戴者平时行走时,常见的运动模式有坐、站、平地行走(LG)、上楼梯(SA)、下楼梯 (SD)、上斜坡(RA)和下斜坡(RD)、转身等。其中,平地行走(LG)、上楼梯(SA)、下楼梯 (SD)、上斜坡(RA)和下斜坡(RD)(如下图所示)具有较明显的周期或准周期特性。
为了识别几种常见的运动模式,需要将从传感器收集到的数据集(带有相应标签的训练数据)输入到分类算法中,构建分类器;当信号输入到分类器时,分类器将输出识别结果。
概括起来虽然简单,但在实际的研究中还是很复杂的:
1、首先,需要注意的是输入的传感信号
多种传感器已经被广泛用于仿生下肢中,如残肢的肌肉信号,包括表面肌电图(sEMG)传感器(电极贴在残肢肌肉表面,记录肌肉表面的电信号)以及一种非接触电容传感器(记录残肢肌肉等的形变信号)。

除了残肢的肌肉信号外,仿生肢体还由不同类型的机械传感器集成:测角计、加速度计、陀螺仪、磁力计、惯性测量单位(IMU)、应变片等。机械传感器比肌电传感器更容易与仿生肢体集成;但它测量的是已经发生的运动信息,与肌电信号相比存在延迟。
另外,脑电图(EEG)信号也可以反映运动信息,但它是一种非平稳信号,在下肢运动意图识别中存在分辨率低这一不足。
2、接下来,是对传感器信号的预处理
不同的感知传感信号用来记录下肢运动的不同功能和物理信息。从传感器中获得的原始信号易被伪影和噪声污染,是不能直接使用的,因此需要信号滤波器对原始传感信号进行预处理,以消除噪声,并提供更有效的信息。
在上面说过的几种传感器中,机械传感器的信号比较稳健,它们的滤波过程很容易操作;相比之下,肌电信号较弱,要放大的同时还要去除噪声。
进行滤波后,各类传感信号打包在一起形成数据流,再进行信号的动态特征提取,不同的信号具有不同的特征提取方法。
3、构建分类器,并输出识别结果
将各种运动数据进行特征提取后进行标记,即形成训练数据集。运动模式识别分类算法包括动态贝叶斯网络(DBN),线性判别分析(LDA),二次判别分析(QDA),高斯混合模型(GMM),支持向量机(SVM),人工神经网络和卷积神经网络(CNN)等。

步态事件检测
我们平时走路的时候,可以很自然地转换步态,比如从平地到上楼梯。但对于仿生下肢穿戴者来说,当仿生腿要转换到新的运动模式时,需要提前识别出该新的运动模式,以便做出相应的响应。

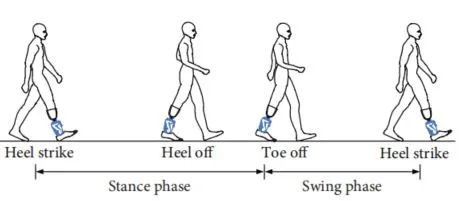
一般来说,可以将一个步态周期分为几个不同的步态阶段,一个步态周期从脚跟着地开始,然后在下一个脚跟着地结束;步态阶段通常分为站立阶段和摆动阶段。
怎样区分从站立阶段过渡到摆动阶段了呢?
可以使用一种阈值决策方法来检测,该方法直接基于输出的传感器信号,当信号达到一定阈值时,就触发了步态事件检测。该方法的准确率较高,不到1μs即可识别摆动和站立阶段。
连续步态估计
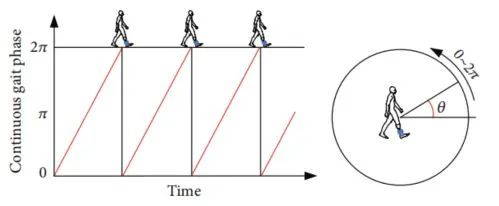
与步态事件检测不同的是,连续步态相位可以被定义为一个单调递增的函数,一个步态周期中从脚跟着地时的0% 到下一次脚跟着地时的 100%。
目前,在仿生下肢的连续步态阶段估计中常用的有三种方法:
第一种方法是计算前几个步态周期的平均持续时间作为分母,然后计算相对于每个步态周期的平均持续时间的时间百分比(即步态相位,从0到100%)。这种方法相对简单,但由于平均持续时间与当前步态周期时间长度存在差异,精度会比较低。
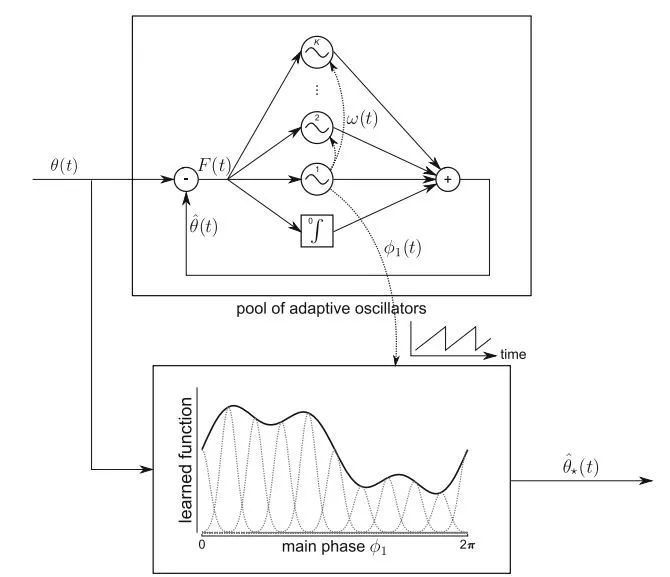
第二种方法是设计或利用特定的算法来估计连续步态相位,如自适应振荡器和扩展的卡尔曼滤波器。
它们有各自的优缺点:自适应振荡器可以获得较高的估计精度、良好的自适应性,但会受到步态变化的影响,应用于非稳态运动时精度会下降。扩展的卡尔曼滤波器能够快速适应步态间的步态变化,但其估计精度仍有待提高。
第三种方法是基于极角方法。
这种方法是通过建立人体腿部胫骨角的极角与步态相位的拟合函数,实现连续步态相位估计;或利用腿部极角位置及其相应的积分计算连续相位。
这种方法基于人体本身的独特特征,具有良好的适应能力、稳健性和平滑性,其不足是有时会对步态变化很敏感,易受到信号漂移的影响。
未来还需努力
有人说,100 年内,身体残障这一概念将不复存在。
这是人们对未来仿生肢体技术的美好愿景,贴合人体的柔软传感与意图识别技术的结合,确实让仿生肢体越来越智能。

然而,目前的运动意图识别技术还不能完全满足控制仿生肢体的需求,大部分的识别研究都是在结构化环境中进行的,与在现实世界中的实际应用还有一定的距离。
此外,运动意图识别的自适应性问题尚未得到很好的解决,自适应问题非常复杂,对从硬件到软件(传感器、识别算法、控制策略、假肢设计等)的要求都很高,这将需要更多的跨学科合作。
论文链接:
