
原创 | 《相机标定》深入理解原理与实战(一)

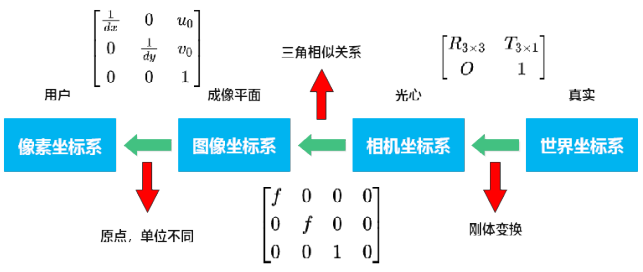
世界坐标系(world Coords):点在真实世界中的位置,描述相机位置,单位 m。
相机坐标系(Cameras Coords):以相机 sensor 中心为原点,建立相机坐标系,单位 m。
图像物理坐标系(Film Coords):经过小孔成像后得到的二维坐标系,单位 mm。
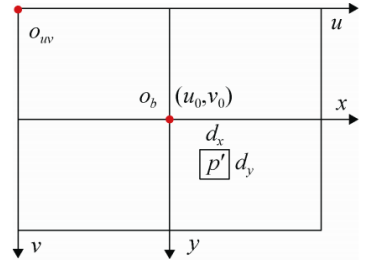
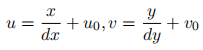
像素坐标系(Pixel Coords):成像点在相机 sensor 上像素的行数和列数,原点为图像左上角,不带有任何物理单位,或者说单位是 pixel主点:光轴与图像平面的交点为主点,即图1.2中的点 p。
主点:光轴与图像平面的交点为主点,即图1.2中的点 p。
 到相机坐标系
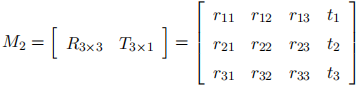
到相机坐标系 的对应关系,他们的转换关系可以通过矩阵 R, T 来表征。R 是相机坐标系相对于世界坐标系的旋转矩阵,T 是相机坐标系相对于世界坐标系的平移矩阵,即相机的中心在世界坐标系的坐标。他们的之间的转换关系可以通过矩阵表示为下面的公式:
的对应关系,他们的转换关系可以通过矩阵 R, T 来表征。R 是相机坐标系相对于世界坐标系的旋转矩阵,T 是相机坐标系相对于世界坐标系的平移矩阵,即相机的中心在世界坐标系的坐标。他们的之间的转换关系可以通过矩阵表示为下面的公式: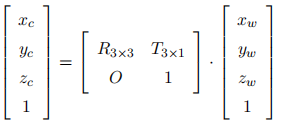
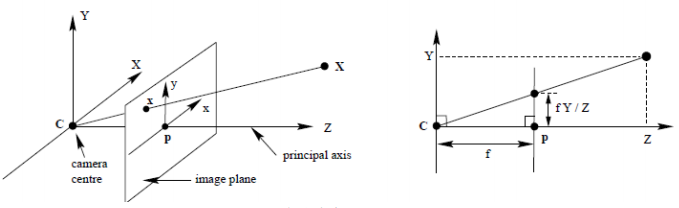
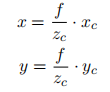
 在图像坐标系中的成像点是 p′(x, y)。这里基于的是小孔成像的原理,原理如图1.2的左图所示,焦距是 f,成像面是与 XOY 平面平行且距离原点 f 的平面。图1.2的右图为 ZcY 截面。利用相似三角形可以求出:
在图像坐标系中的成像点是 p′(x, y)。这里基于的是小孔成像的原理,原理如图1.2的左图所示,焦距是 f,成像面是与 XOY 平面平行且距离原点 f 的平面。图1.2的右图为 ZcY 截面。利用相似三角形可以求出: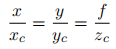
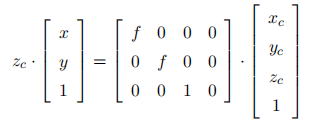
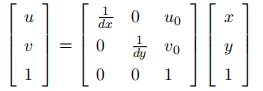
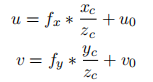
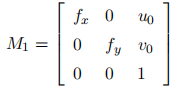
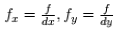 ,代表焦距除以单个的像素大小,所以单位是像素,在相机的标定过程中 dx, dy, f 均不能直接测量得到的,组合值 fx, fy 可以标定得到。zc 是三维点在相机坐标系中深度值。从世界坐标系到像素坐标系,写成矩阵形式,可以得到:
,代表焦距除以单个的像素大小,所以单位是像素,在相机的标定过程中 dx, dy, f 均不能直接测量得到的,组合值 fx, fy 可以标定得到。zc 是三维点在相机坐标系中深度值。从世界坐标系到像素坐标系,写成矩阵形式,可以得到: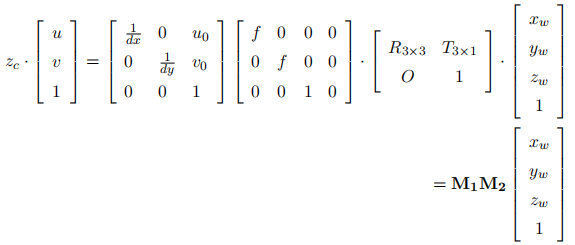



作者简介
林夕,电子科技大学硕士,主要研究方向:推荐系统、自然语言处理和金融风控。希望能将算法应用在更多的行业中。
编辑:于腾凯
校对:李敏
评论