
深入浅出 Linux 进程管理
1. 基础知识
进程类型
实时进程
非实时进程
CPU 资源占用类型
CPU 消耗性 (CPU-Bound)
I/O 消耗性 (IO-Bound)
交互进程(对响应时间有要求)
进程优先级
静态优先级 (static_prio)
实时进程 0 - 99
非实时进程 100 - 139

非实时进程静态优先级可以通过 nice() 进行调整。 范围 (-20 - 19)
动态优先级 (prio) 保存进程的动态优先级,通常也是调度类使用的优先级,某些情况下在内核中会临时调整该优先级,比如实时互斥量。
时间片 (time slice) 表示进程被调度进来和被调度出去所能持续的时间长度;
进程内核结构 进程在内核中数据结构 PCB(Process Control Block) 为 task_struct 结构。
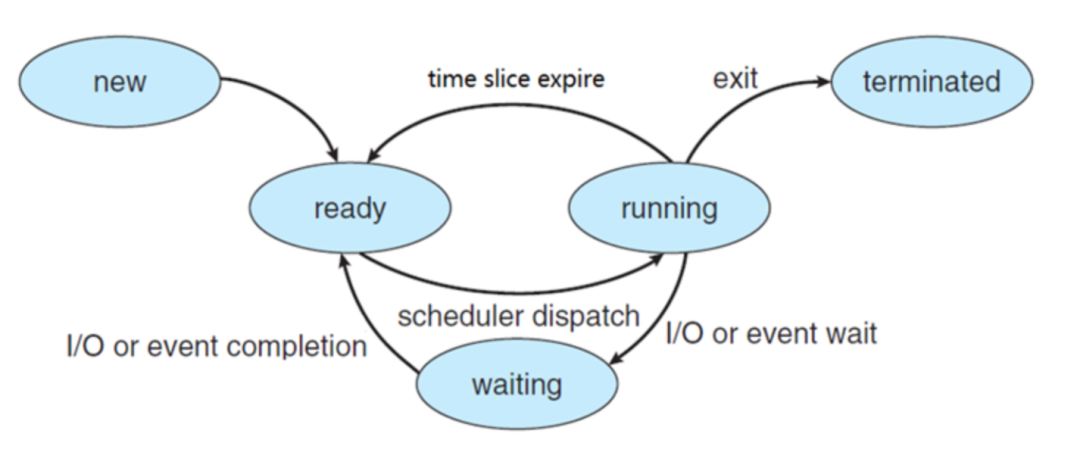
进程运行状态
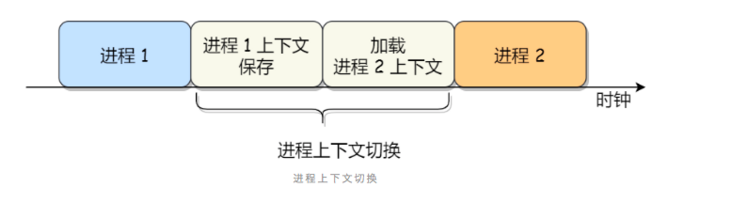
进程上下文切换 进程的上下文切换不仅包含了虚拟内存、栈、全局变量等用户空间的资源,还包括了内核堆栈、寄存器等内核空间的资源。
参见 操作系统进程知识总结
2. Linux 调度器
2.1 调度器
调度器是整个系统的发动机,负责所有就绪进程的调度运行,设计良好的调度器需要从以下几个方面进行考虑:
吞吐量
响应时间
公平性
功耗 (移动设备)
调度类型
主动放弃 CPU (由于需要等待或者主动进入 Sleep)
被动放弃 CPU (由于时间片消耗完或被更高优先级的任务抢占-如支持抢占)
2.2 Linux 调度器历史
O(n) 2.4 内核
O(1) 2.6 内核
CFS 2.6.23+ (当前默认调度器)
2.3 O(n) 调度算法
调度数据结构
2.3 O(n) 调度算法
调度数据结构
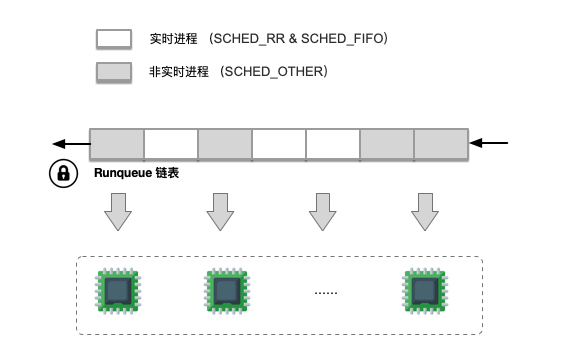
复杂度:时间复杂度为 O(n), n 代表当前就绪状态的进程数目。
全局一个列表队列,不区分实时和非实时进程。CPU 遍历的时候都需要加锁操作,当就绪任务较多时,加锁周期会比较长。
进程就绪状态加入到 runqueue 队列,阻塞或者退出时候从队列移除。
时间片分配
在运行时动态计算优先级,保证实时进程的优先级高于非实时任务的动态优先级,实时进程动态优先级 (1000 + p->rt_priority); 在计算动态优先级的时候会综合考虑该任务的剩余时间片、历史执行情况等因素。
任务 Nice 越低,剩余时间片越多,动态优先级越高,越有机会获得运行;
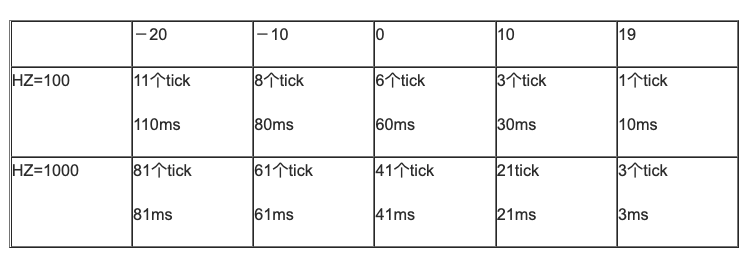
任务运行的最大时间由动态优先级转变为固定 tick 数目,tick 的时间值由系统动态配置的 HZ 时钟精度确定。
调度运行
调度器遍历整个就绪队列中全部的 n 个任务,选取 动态优先级 最高的任务进行调度运行。
list_for_each(tmp, &runqueue_head) {
p = list_entry(tmp, struct task_struct, run_list);
if (can_schedule(p, this_cpu)) {
int weight = goodness(p, this_cpu, prev->active_mm);
if (weight > c)
c = weight, next = p;
}
}
goodness函数中找出优先级最高的一个进程。
调度运行
tick 中断:tick 中断函数中检查检查时间片是否使用完,使用完毕则进行进程切换;否则将剩余时间片的 1/2 追加到动态优先级。
当系统无可运行任务或所有任务执行完时间片后,调度器需要将系统中(不是 runqueue 中)所有任务的重新设置默认时间片;如果等待队列中的进程的时间片仍然有剩余,则会折半计入到下一次的时间片中;
优点
实现逻辑简单,在早期运行任务数量有限的情况下,运行良好。
缺点
时间复杂度为 O(n),当所有调度任务完成后,需要对全部任务重新初始化,耗时高;
实时进程可能不能及时调度;
全局只有一个运行队列,会导致 CPU 存在空闲;
SMP 系统中扩展问题,访问运行队列需要加锁,特别是进程数量大时;
进程在不同 CPU 上进行跳转,cache 缺失,性能受到影响;
Linux内核中不确定性的 N 可能会带来较大的风险影响。
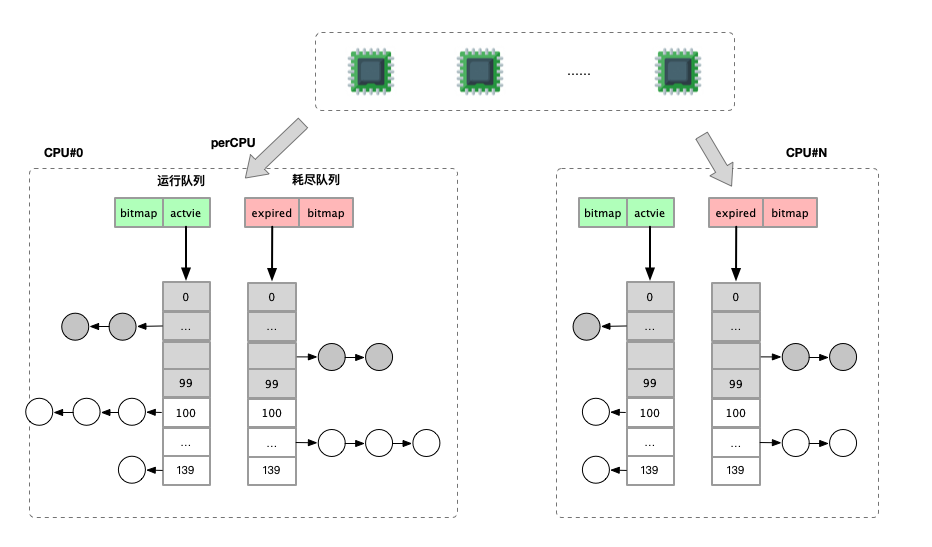
2.4 O(1) 调度器
数据结构
每个 CPU 一个优先级队列的方式。同时对于队列设置一个按照进程优先级的数组。
分为 active 和 expired 两个数组,分别表示当前正常运行的队列和已经过期的队列。
当 active 队列任务全部完成运行后,将 expired 与 active 互换。
为了快速判断优先级数组的列表中是否存在任务,使用 bitmap 索引。
时间片分配
静态优先级为 [ -20 … 0 … 19 ] 的普通进程,其缺省时间片为[800ms … 100ms … 5ms]。
同时结合进程的实际运行情况,比如在 runqueue 中的等待时间、睡眠时间等因素,实时调整动态优先级,以期望更好识别出交互进程。
runqueue 中的进程优先级为动态优先级。
动态优先级映射为时间片。
调度运行
schedule 函数的主要功能是从该 CPU 的 runqueue 找到一个最合适的进程调度执行。其基本的思路就是从 active 优先级队列中依次查找,代码如下:
idx = sched_find_first_bit(array->bitmap);
queue = array->queue + idx;
next = lis_entry(queue->next, task_t, run_list);当 active 优先级队列中没有需要运行的任务,则交换 active 与 expired。
不再需要像 O(n) 那样对系统中全部任务重新初始化时间片。
在 tick 函数中断中判断任务时间片是否使用完,如果时间片使用完毕,正常情况下将任务从移动到 expired 队列中,但是如果判断为交互进程,依照交互进程指数 TASK_INTERACTIVE ,可能还是会放入到 actvie 队列中;
如果 expired 队列中的任务等待时间过长,说明调度其严重不公,这时候即使判断出来时间片耗尽的进程是交互进程,仍然会被放入 expired 队列,尽快完成本次调度;
优点
O(1) 调度器开销比较小,大多数场景下都有不错的表现;
重点关注交互进程,在交互进程的响应时间方面得到了很好的改善;
缺点
交互式任务的判定算法过于复杂,参数硬编码,代码可维护性变差;
静态时间片,任务增加调度延时上升;
2.5 CFS 调度器
调度策略
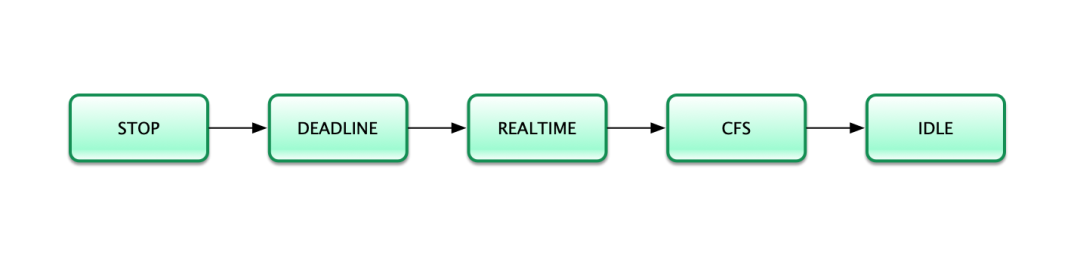
进程调度依赖于调度策略,Linux 把相同调度策略抽象成了调度类(schedule class)。CFS 只负责非实时进程的处理。
优先级按照从高到低的方式进行调度, STOP 最高, IDLE 最低。
进程权重
CFS 调度器中使用静态优先级对应的权重概念来对应。权重的对应关系 (-20 - 19)。进程每降低一个 nice 值,将多获得 10% CPU 的时间。
const int sched_prio_to_weight[40] = {
/* -20 */ 88761, 71755, 56483, 46273, 36291,
/* -15 */ 29154, 23254, 18705, 14949, 11916,
/* -10 */ 9548, 7620, 6100, 4904, 3906,
/* -5 */ 3121, 2501, 1991, 1586, 1277,
/* 0 */ 1024, 820, 655, 526, 423,
/* 5 */ 335, 272, 215, 172, 137,
/* 10 */ 110, 87, 70, 56, 45,
/* 15 */ 36, 29, 23, 18, 15,
};vruntime(virtual runtime)
表示该进程已经在 CPU 上运行的时间,值越大被再次调度概率越低。将不同优先级的进程运行的时间作为一个统一视图来进程处理。
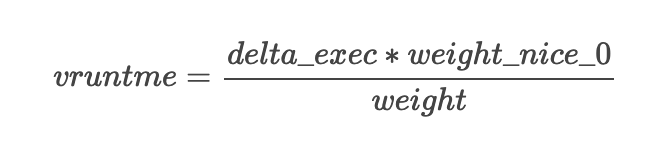
vruntime虚拟运行时间delta_exec真实运行时间nice_0_weight表示nice为 0 的进程权重weight表示进程权重进程的 vruntime 增长速度取决于其优先级
优先级越低,则 vruntime 增长越快,因而被再次调用的可能性就越小
优先级越高,则 vruntime 增长越慢,因而被再次调用的可能性就越大
动态时间片
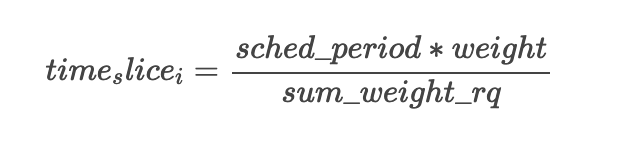
调度周期 sched_period,保证一个调度周期内,运行队列中的所有任务都会被调度一次,最坏情况下,任务的调度延时为一个调度周期;
默认调度周期 sched_latency 默认为 6 ms;任务平均时间片最小值 sched_min_granularity 为 0.75 ms
8 个以内可运行时间设定为 6ms,否则为 N * sched_min_granularity;
if sched_latency/nr_running < sched_min_granularity
sched_period = nr_running * sched_min_granularity确定好 sched_period 以后,每个任务的动态时间片为:
调度数据结构
每个 CPU 对应一个运行队列 runqueue,该运行队列中包含 dl_rq/rt_rq/cfs_rq 等多个调度队列。CFS 只处理普通进程。
使用 vruntime 作为红黑树的索引键,使用 sched_entity 作为值。
最小值在最左侧,可以 O(1) 进行遍历,插入 O(logN)
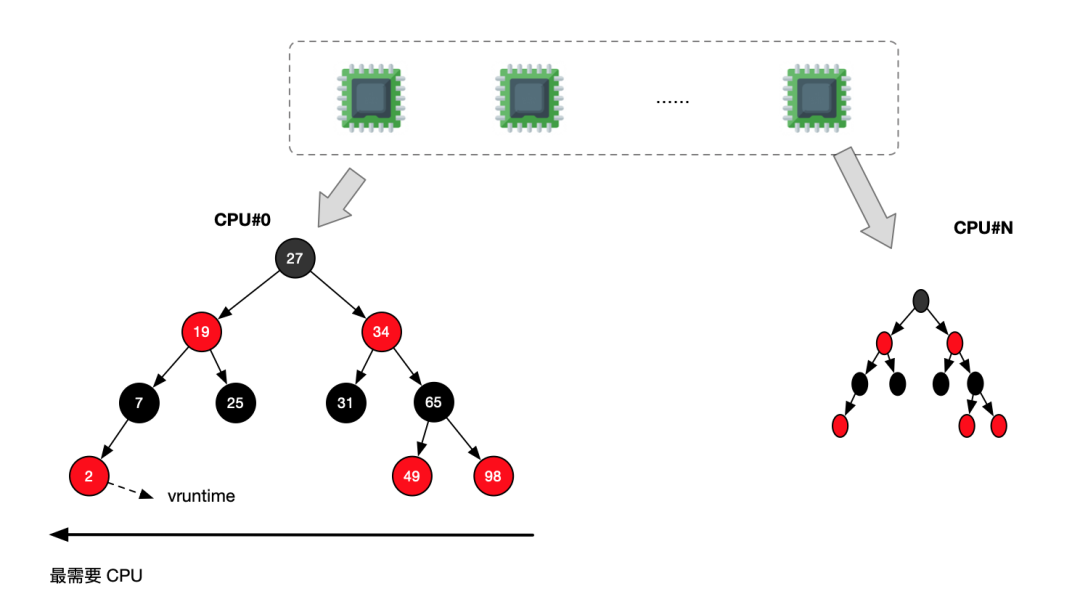
调度运行
static inline struct task_struct *
pick_next_task(struct rq *rq, struct task_struct *prev, struct rq_flags *rf)
{
struct task_struct *p;
if (likely((prev->sched_class == &idle_sched_class ||
prev->sched_class == &fair_sched_class) &&
rq->nr_running == rq->cfs.h_nr_running))
{
p = fair_sched_class.pick_next_task(rq, prev, rf);
}
again:
for_each_class(class) {
p = class->pick_next_task(rq, prev, rf);
}
}pick_next_task_fair
static struct task_struct *
pick_next_task_fair(struct rq *rq, struct task_struct *prev, struct rq_flags *rf)
{
struct cfs_rq *cfs_rq = &rq->cfs;
struct sched_entity *se;
struct task_struct *p;
put_prev_task(rq, prev);
do {
se = pick_next_entity(cfs_rq, NULL);
set_next_entity(cfs_rq, se);
cfs_rq = group_cfs_rq(se);
} while (cfs_rq);
p = task_of(se);
return p;
}pick_next_entity 从红黑树上读取调度实体
static struct sched_entity *
pick_next_entity(struct cfs_rq *cfs_rq, struct sched_entity *curr)
{
struct sched_entity *left = __pick_first_entity(cfs_rq);
struct sched_entity *se;
se = left; /* ideally we run the leftmost entity */
// .. 抢占/唤醒或者其他判断
return se;
}调度函数在各自 CPU 上执行,依次运行 dl_rq/rt_rq/cfs_rq 队列。
运行 cfs_rq 队列时:
每次调度程序都选择红黑树最左侧的节点运行(其 virtual runtime 最小),将其从红黑树中删除,并调整红黑树
每隔一段时间,就更新正在运行的进程的 vruntime,并将更新后的值与当前红黑树中最左侧节点的 vruntime 相比较
如果小于最左侧节点的 virtual runtime,则继续执行当前进程
如果大于最左侧节点的 virtual runtime,则抢占式地运行最左侧的节点,并将当前正在运行的进程重新放到红黑树中
而且在每一个调度周期内调度器会不断检查公平性是否得到了满足,通过修订 vruntme 的值来进行平衡,比如新加入的进程和被唤醒的进程会在 vruntme 上进行补偿。
新进程加入及睡眠进程唤醒
static void place_entity(struct cfs_rq *cfs_rq, struct sched_entity *se, int initial)
{
u64 vruntime = cfs_rq->min_vruntime;
if (initial && sched_feat(START_DEBIT)) // 如果是初始化
vruntime += sched_vslice(cfs_rq, se); // 计算新进程的 vruntime 添加到 min_vruntime,防止过度占用
if (!initial) {
unsigned long thresh = sysctl_sched_latency; // 一个调度周期延时
if (sched_feat(GENTLE_FAIR_SLEEPERS))
thresh >>= 1; // 折半处理,防止过度占用
vruntime -= thresh; // 减掉 thresh,让进程获得尽快调度
}
/* ensure we never gain time by being placed backwards. */
se->vruntime = max_vruntime(se->vruntime, vruntime);
}优点
基于优先级,兼顾运行公平性,默认调度器,经受住了时间的考验;
缺点
在 Android 等嵌入式设备上,仍然需要调整和优化;
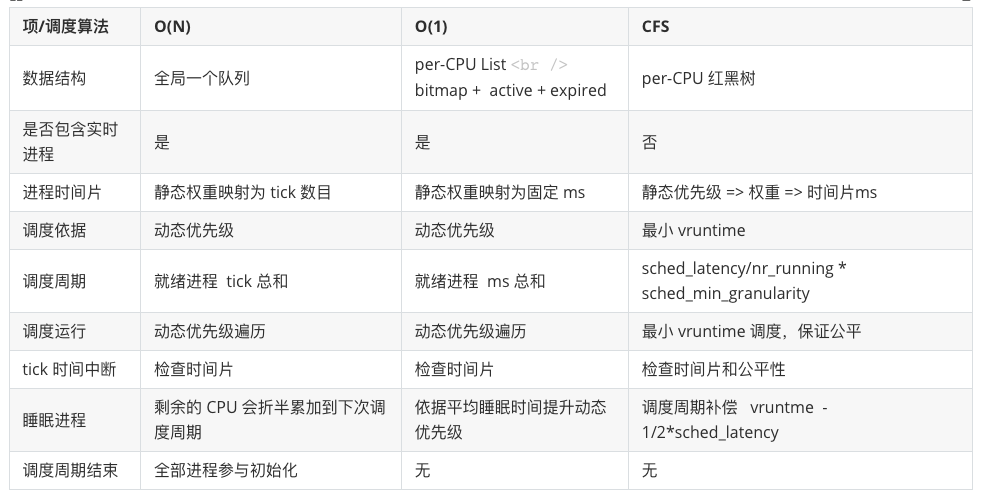
2.6 调度器综合对比
2.7 未来调度器
ARM 体系存在 big.LITTLE 模型,存在大小核数的结构。
HMP 调度器
EAS 绿色节省调度器 (HMP 的优化版)
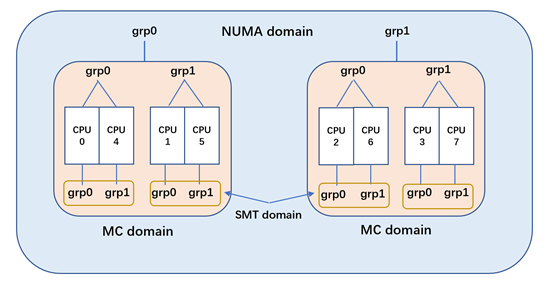
NUMA 调度器
3. 高阶话题
3.1 抢占
触发抢占: 给正在CPU上运行的当前进程设置一个请求重新调度的标志(TIF_NEED_RESCHED),仅此而已,此时进程并没有切换。
触发时机:
周期性的时钟中断:scheduler_tick() 时间片耗尽
进程唤醒:当进程被唤醒的时候,优先级高于CPU当前进程
新进程创建
进程修改 nice 值
负载均衡
执行抢占:在随后的某个时刻,内核会检查TIF_NEED_RESCHED标志并调用 __schedule()执行抢占。
抢占如果发生在进程处于用户态的时候,称为 User Preemption(用户态抢占);如果发生在进程处于内核态的时候,则称为Kernel Preemption(内核态抢占)。
从系统调用(syscall)返回用户态时
中断处理程序返回内核空间之前会检查TIF_NEED_RESCHED标志,如果置位则调用preempt_schedule_irq()执行抢占。preempt_schedule_irq()是对schedule()的包装。
抢占只在某些特定的时机发生,这是内核的代码决定的。
3.2 CPU 负载计算方式 PLET
为了让调度器更加高效,需要针对每个调度队列和每个调度实体的负载进行衡量。 (Per Entity Load Tracking)
时间(物理时间,不是虚拟时间)被分成了 1024us 的序列,在每一个周期中,一个 Entity 对系统负载的贡献可以根据该实体处于 Runnable 状态(正在 CPU 上运行或者等待 CPU 调度运行)的时间进行计算。如果在该周期内,Runnable的时间是 x,那么对系统负载的贡献就是(x/1024)。
负载需要考虑历史周期的影响 y^32 = 0.5, y = 0.97857206
L = L0 + L1 * y + L2 * y^2 + L3 * y^3 + ... + Ln * y^n当前对于负载的计算 上个周期的负载贡献值乘以衰减系数,加上当前时间点的负载即可。
经过 32 个周期,负载降低为 0.5 倍, 经过 2016 个周期,全部负载衰减为 0
更新时机:就绪队列添加任务、删除任务和周期性更新
就绪队列的 load_avg(包含睡眠进程的贡献) 与 runnable_load_avg(只统计可运行任务的负载) 。
3.3 负载均衡 SMP 和 NUMA
负载均衡迁移基于 runnable_load_avg 的值。
负载均衡流程:
判断当前 CPU 是否需要负载均衡
负载均衡以当前 CPU 开始,由下至上调度域,从最底层的调度域开始做负载均衡
在调度域中查找最繁忙的调度组,更新调度域和调度组的相信统计信息,计算出该调度域的不均衡负载值;
在最繁忙的调度组中找出最繁忙的 CPU,然后把繁忙的 CPU 中的任务迁移到当前的 CPU,迁移负载量为不均衡负载值。
NUMA 类似,更是更加复杂,需要处理跨 NUMA 内存和进程迁移。
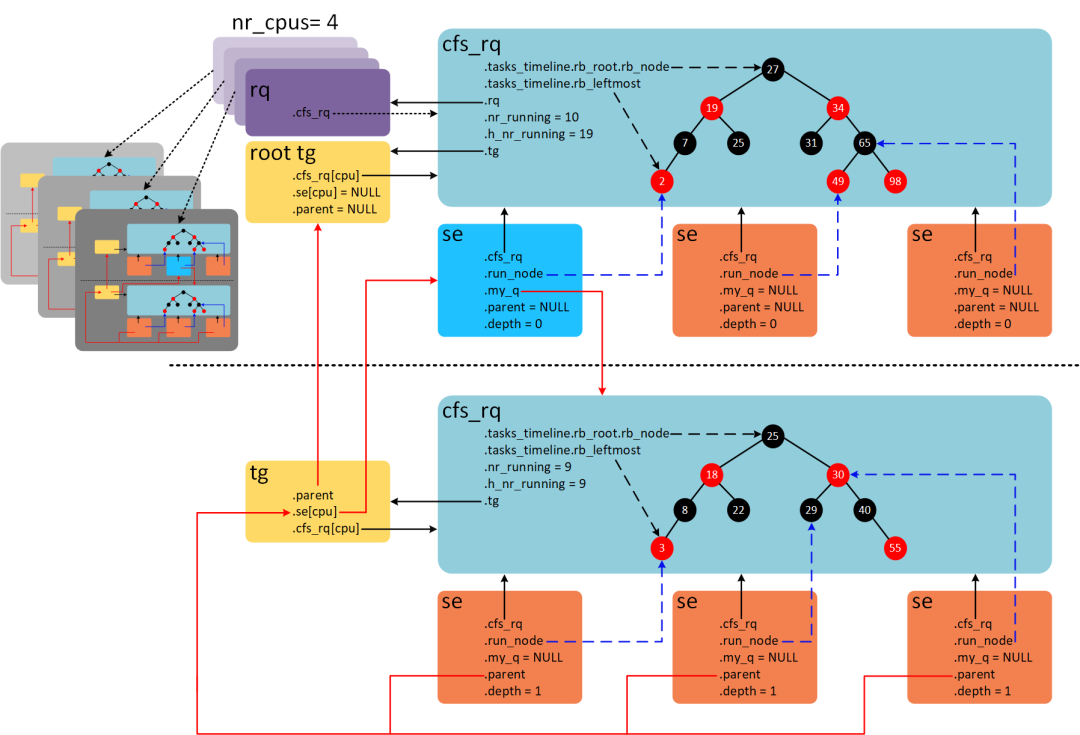
3.4 调度任务组
原文链接:https://www.ebpf.top/post/linux_process_mgr/