
SLAM全栈+三维重建全栈系统学习路线!
三维重建全栈学习系列包括:《彻底搞透视觉三维重建:原理剖析、代码讲解及优化改进》、《国内首个基于结构光投影三维重建系列视频课程》、《国内首个面向工业级实战的点云处理课程》、《相机标定从入门到精通:基本原理与实战》四门课程。
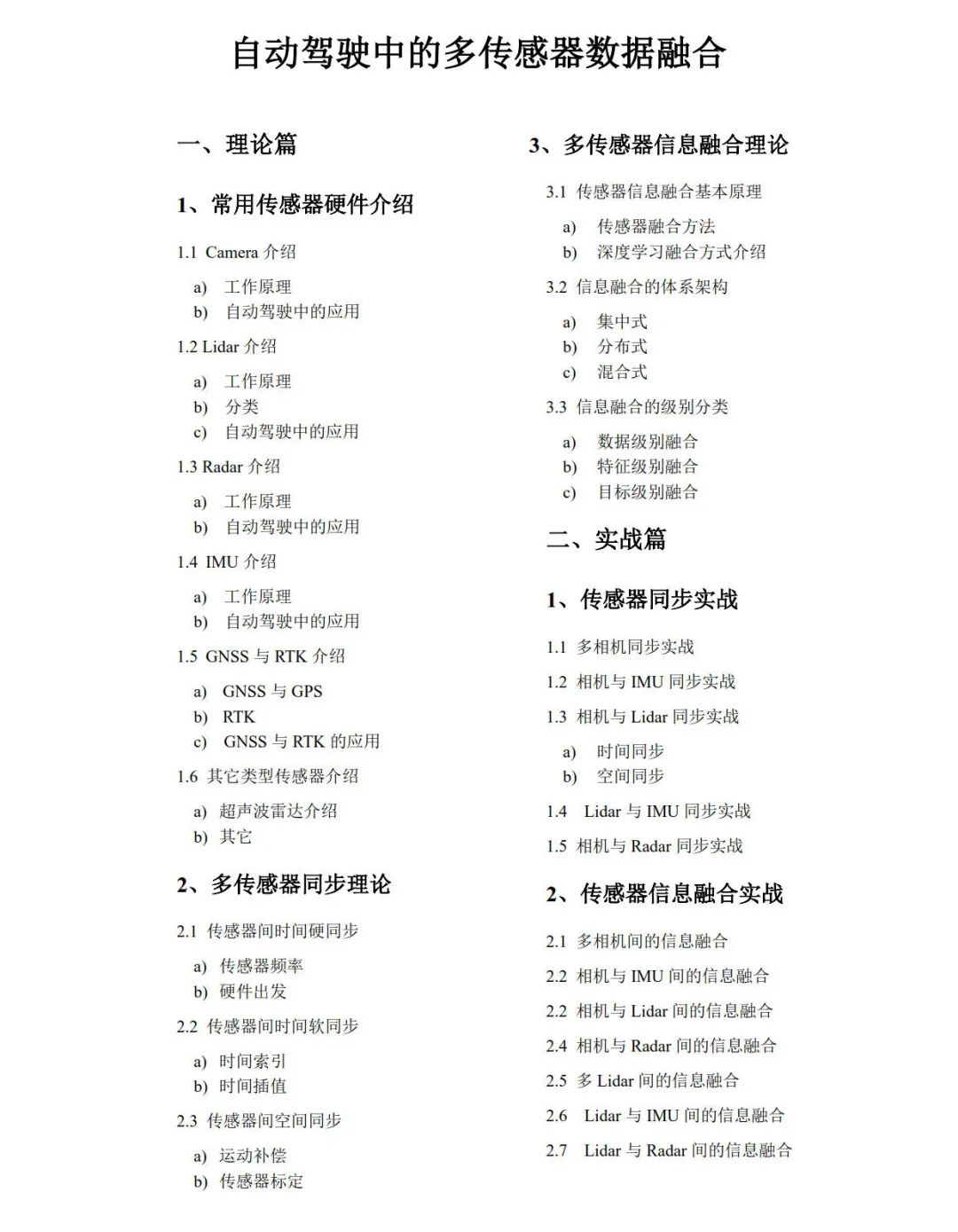
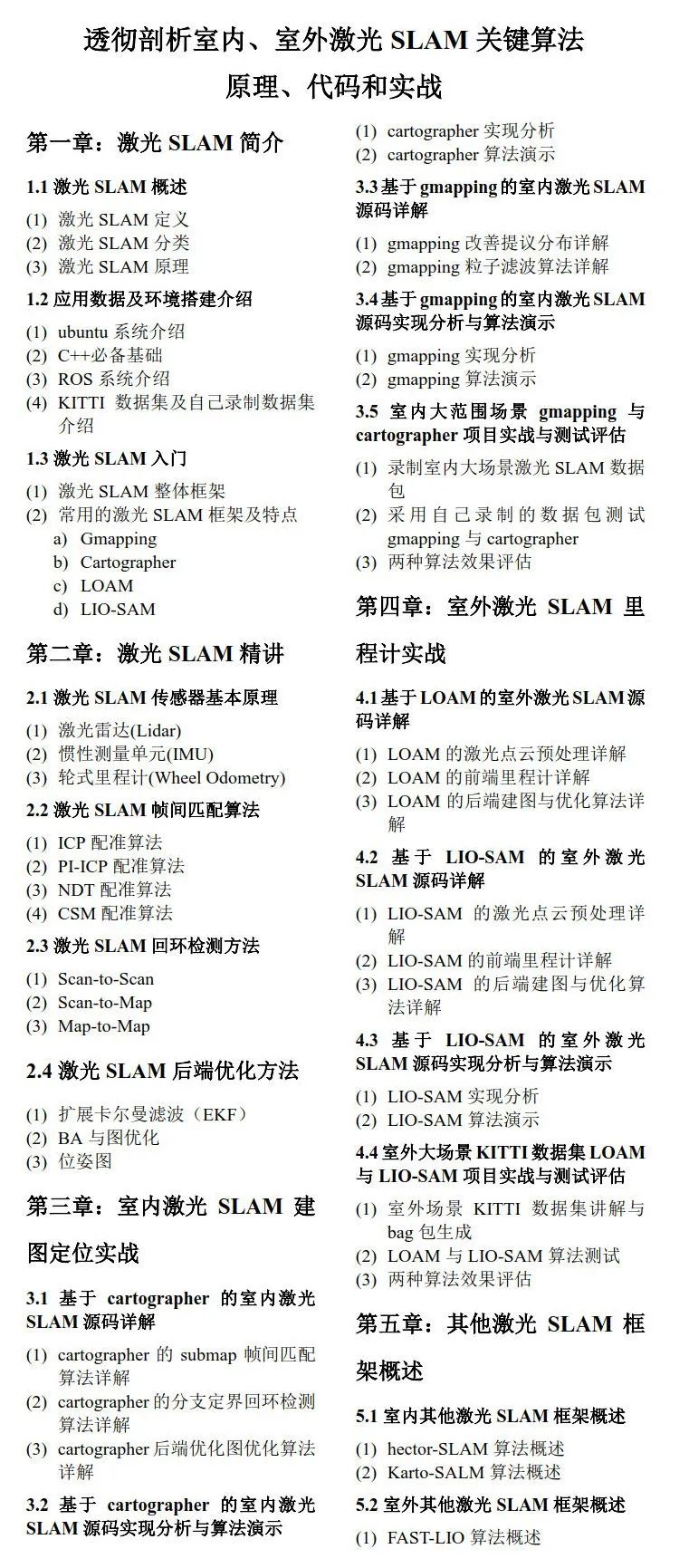
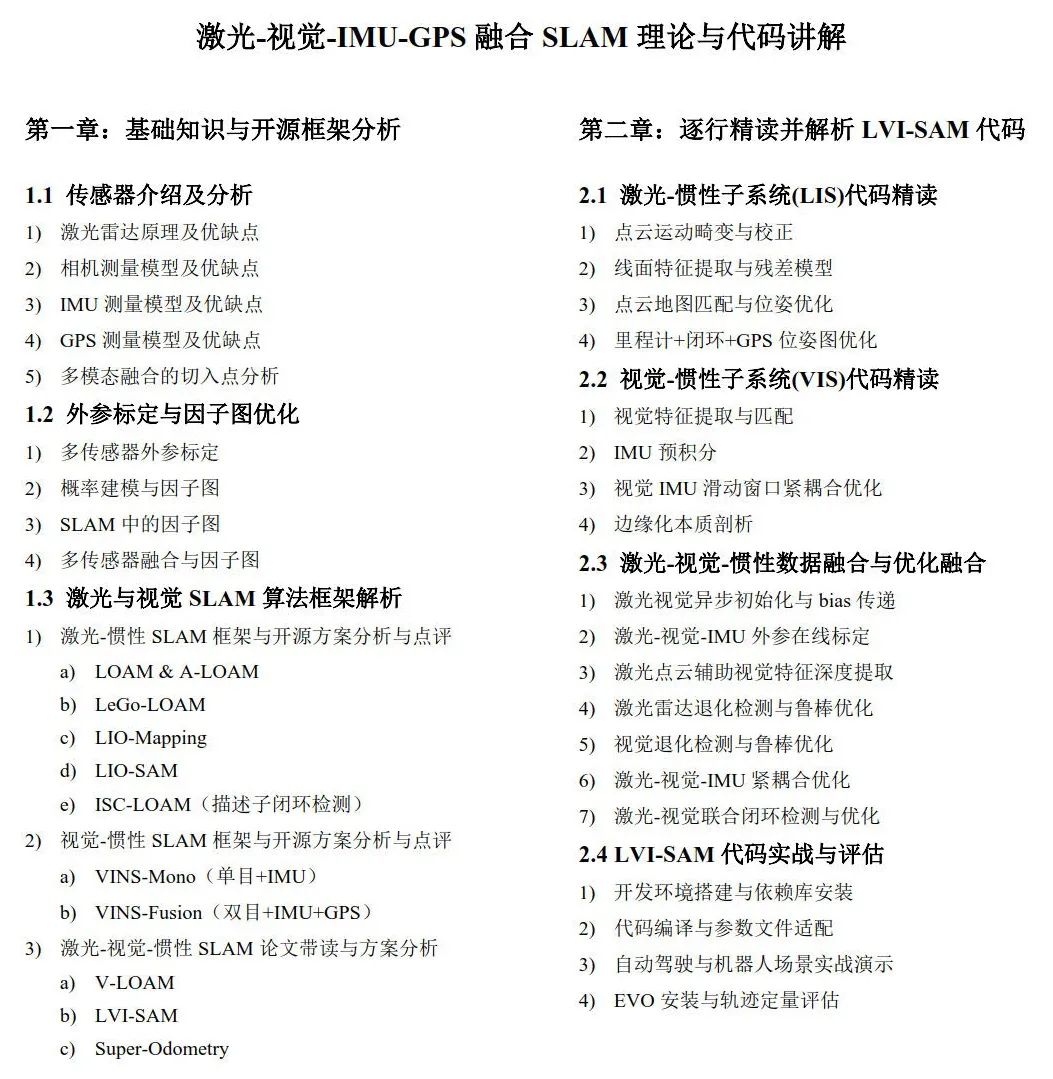
SLAM全栈学习系列课程大纲


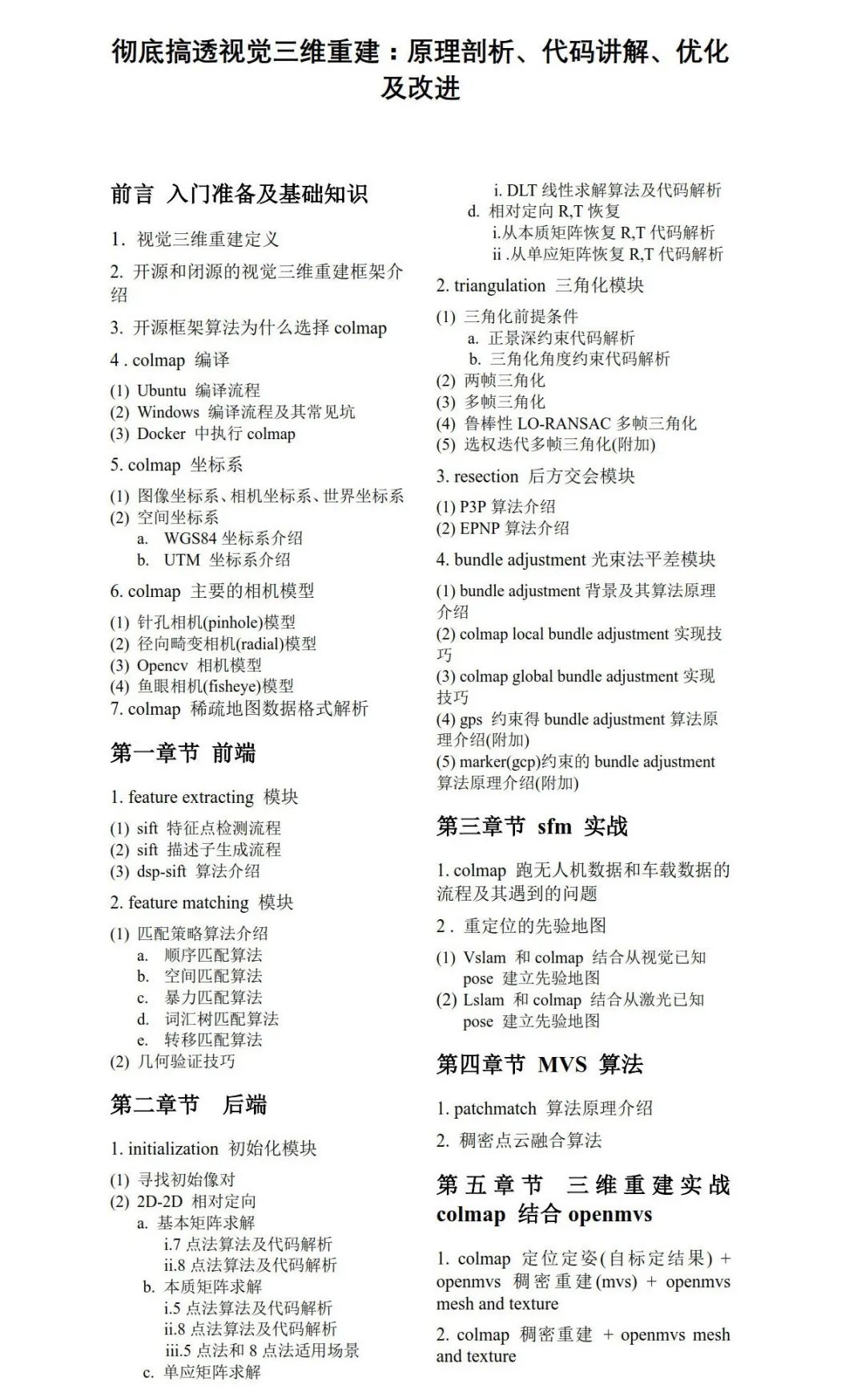
三维重建全栈学习系列课程大纲

国内首个基于结构光投影三维重建系列视频课程
绪论; 基于格雷码结构光投影的三维传感技术; 基于格雷码结合相移技术的动态三维传感方法: 几种时间相位展开方法的基本原理及方法比较; 双目立体匹配三维重建方法; 结构光测量系统的标定; 投影仪非线性校正; 高反射物体表面测量方法; 实时结构光三维面形测量方法; 高速结构光三维面形测量方法; 全局效应性下的结构光三维重建方法: 结构光方法新应用; 深度学习在结构光三维重建中的应用。
相机标定从入门到精通:基本原理与实战
相机模型
张正友标定简介
标定改进方法
实际标定操作技术全面详解
评论