
实训产品:Orbbot S1移动机器人介绍
- 01 -
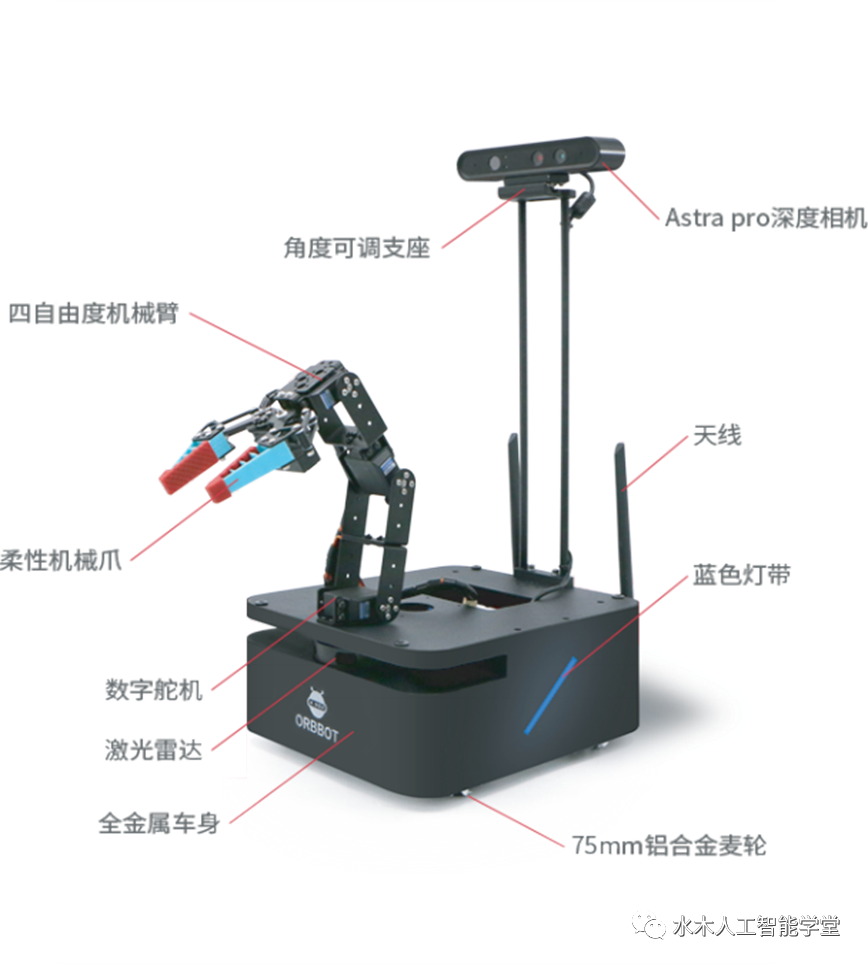
产品介绍
- 02-
产品特点
通过RGBD相机识别指定颜色色块,并进行定位和机械臂抓取;
集成SLAM功能包,可通过雷达或RGBD相机完成建图和导航;
3、视觉避障
通过视觉或视觉融合雷达数据等方式,在导航过程中完成避障;
4、人体骨架识别
集成人体骨架识别算法,可输出21个关节点的3维坐标信息。
- 03-
规格参数
序号 | 名称 | 规格参数 |
1 | 型号 | ORBBOT S1 |
2 | 驱动结构 | 四轮麦克纳姆轮结构 (带摆式悬挂) |
3 | 轮子 | 75mm铝合金 麦克纳姆轮 |
4 | 尺寸 | 282*242*544.5mm |
5 | 小车自重 | 5.96kg |
6 | 负载能力 | 2.8kg |
7 | 最大速度 | 1.25m/s |
8 | 轻载续航速度0.45m/s | 3.5h |
9 | 负载1kg续航速度0.45m/s | 3h |
10 | 电机 | MG513电机 |
11 | 编码器 | 光电编码器 |
12 | 控制方式 | APP、PS2无线手柄、CAN、串口等 |
13 | STM32主控 | STM32F407VET6 |
14 | ROS主控 | Jetson Nano 4GB版 |
15 | 激光雷达 | 360°激光测距雷达 |
16 | 深度摄像头 | Astra Pro RGBD深度相机 |
17 | IMU传感器 | ICM20948 (三轴陀螺仪+三轴加速度计+三轴磁力计) |
18 | 操作系统 | STM32搭载FreeRTOS Ubuntu搭载ROS Melodic |
19 | 资料 | 全系列开发手册、视频教程、STM32源码 |
- 04-
面向专业
中职 :电子与信息技术、电子技术应用、工业机器人技术应用、工业自动化仪表及应用、电气运行与控制、电气技术应用、机电技术应用、智能设备运行与维护、机电设备安装与维修。
高职 :机电一体化技术、电气自动化技术、机器人技术、人工智能技术应用、计算机应用技术、智能控制技术、工业机 器人技术、电子信息工程技术、应用电子技术、自动化生产设备应用、电子制造技术与设备、嵌入式技术与应用、机电设备安装与维修。
应用本科:通信工程、计算机应用与技术、电子信息工程、机械工程、机器人工程、人工智能学院、物联网工程、电气工程及自动化、工业互联网工程、智能制造工程技术等。
- 05-
就业岗位方向
- 06-
应用案例

