
本文约1300字,建议阅读5分钟
当无人机“长了爪子”……
多年来,无人机技术已经得到迅速发展,可以在天空中自由飞行,但是,无人机虽然能够像鸟类一样飞行,着陆时却没有鸟类稳定的着陆能力。
经过数百万年的进化,鸟类的起飞和着陆看起来如此简单,但是让无人机模仿鸟类的着陆方式并不容易,这涉及各种平衡问题。鸟类爪子像雪花一样,没有两个分支是一样的,它们的大小、形状和纹理各不相同,几乎可以栖息在任何一个物体上,例如树枝和岩石等。 近日,来自斯坦福大学的工程师 Mark Cutkosky 以及来自荷兰格罗宁根大学的 David Lentink 受鸟类启发,研发出一款名为 SNAG 的机械爪,SNAG 可以在复杂的表面起飞和着陆,还能捕捉空中的物体。此外,SNAG 的栖息能力,能够使其在更长的时间内进行科学研究。目前,这一研究登上《Science》子刊《Science Robotics》封面。
https://www.science.org/doi/10.1126/scirobotics.abj7562
无论在什么表面上,SNAG 都能稳稳的降落,看起来就像真的鸟类一样:
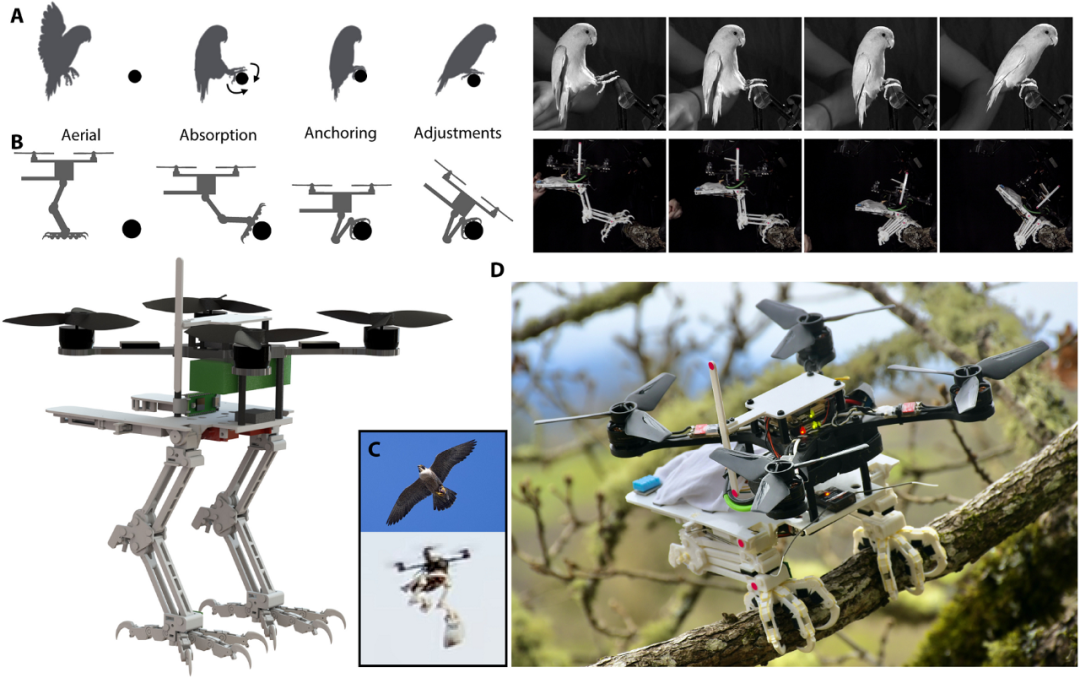
在之前对短尾鹦鹉(parrotlet,第二小的鹦鹉物种)的研究中,研究人员发现这些小型鸟类在特殊栖息地之间飞来飞去,同时使用五台高速摄像机记录下来。特殊栖息地里有各种材料,包括木材、泡沫、砂纸和特氟龙和传感器,用于捕捉与鸟类着陆、栖息和起飞相关的物理作用力。论文一作 Will Roderick 表示:「让我们感到惊讶的是,无论短尾鹦鹉降落在什么表面,它们都会做相同的空中机动。它们令自己的脚来处理表面纹理本身的可变性和复杂性。」
像鹦鹉一样,SNAG 机器爪也以相同的方式着陆。不过,考虑到四轴飞行器的尺寸和重量,SNAG 基于游隼(peregrine falcon)的腿。SNAG 机体采用 3D 打印结构(需要 20 次迭代才能完善),用使用马达和钓鱼线替代肌肉和肌腱。
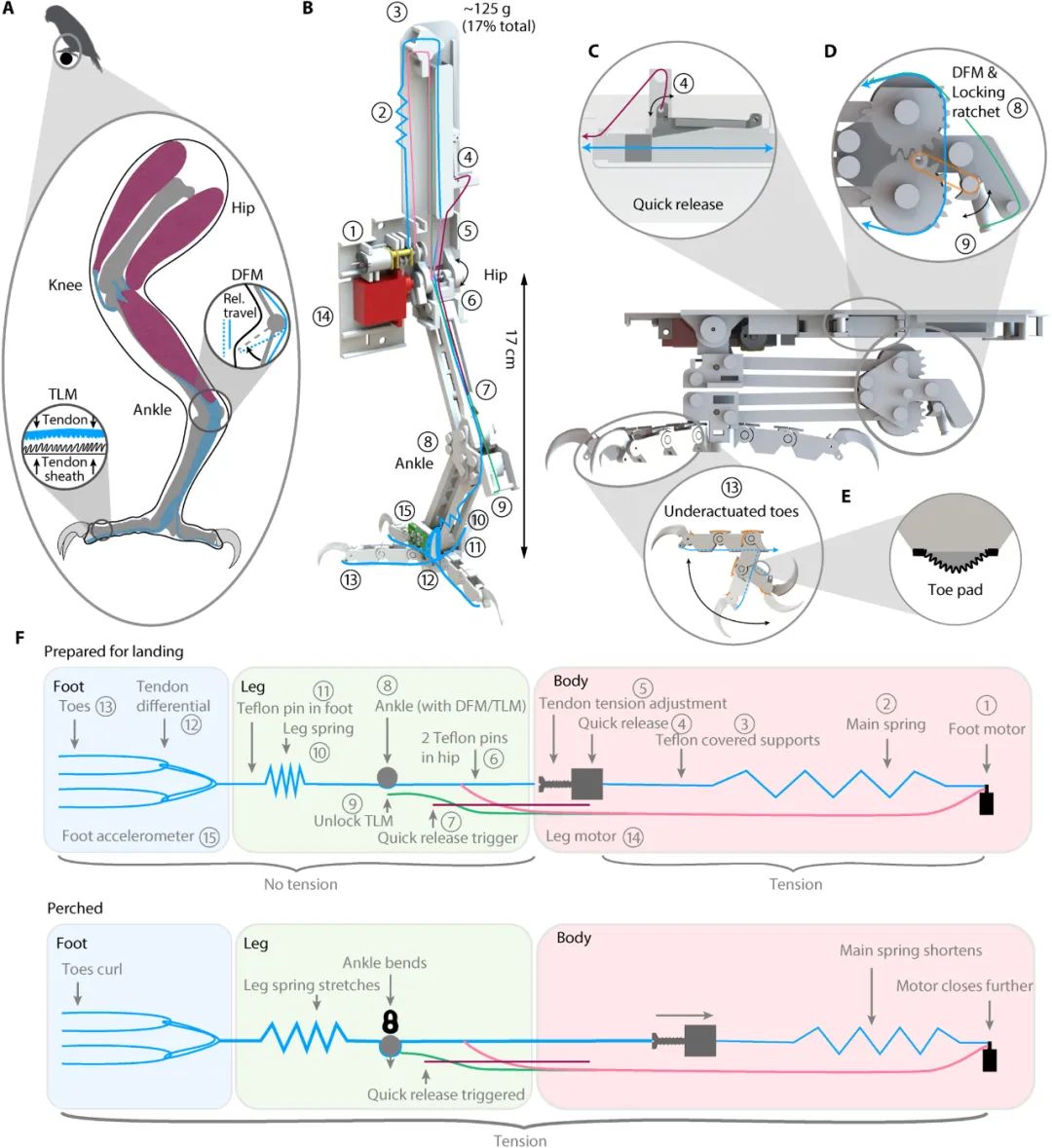
下图为 SNAG 结构,它包含两条受鸟类启发的机械腿和末端执行器,使得无人机能够在复杂的表面起飞和着陆,并可以捕捉空中的物体。
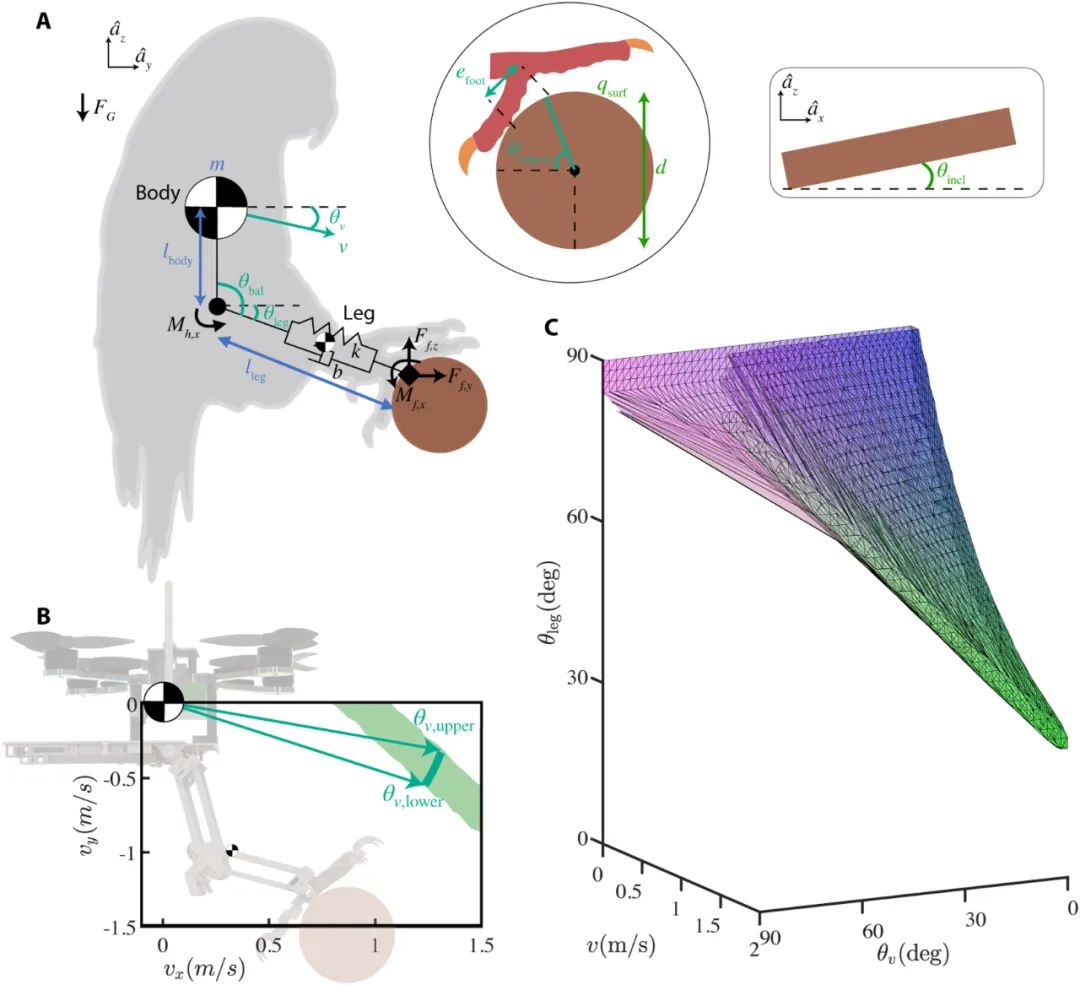
每条腿都分别有用于来回移动和处理抓握的马达。受鸟类脚踝处肌腱走向的启发,SNAG 机械腿采用的类似机制吸收着陆冲击能力并转换为抓握力。因此,SNAG 拥有一个异常强大和高速的离合器,可以在 20 毫秒内触发关闭。一旦机械爪缠绕在树枝上,脚踝处就会锁定,同时右腿上的加速器会报告机器人已经着陆并触发平衡算法来保持稳定。下图为受鸟类启发的抓握设计机制:
以及用于着陆的抓握参数充分(parameter sufficiency)区域:
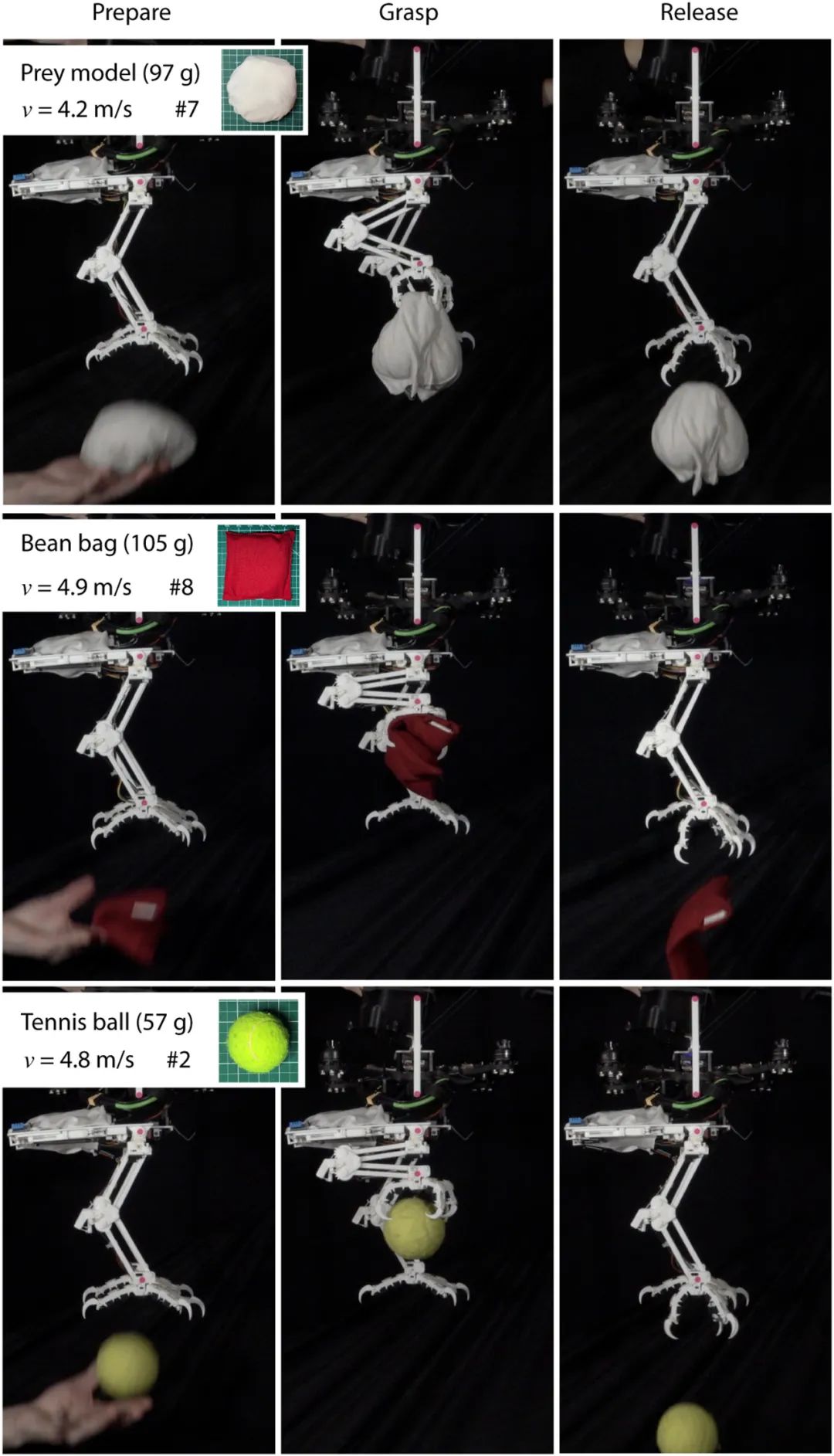
为了测试 SNAG 的抓握性能,Roderick 将包括 3D 打印机在内的设备从斯坦福大学的 Lentink 实验室搬到了俄勒冈州的农村,并在那里建了一个地下试验室进行受控测试。实验期间,他沿着铁路系统(rail system)发射 SNAG,并以预定义的速度和方向将机器人发射到不同的表面,以观察在不同场景中的表现。同时将 SNAG 固定,Roderick 确认了它有能力抓住用手抛出的物体,如一个豆袋、网球等。
下图是 SNAG 使用预备、抓取和释放物体的全过程:
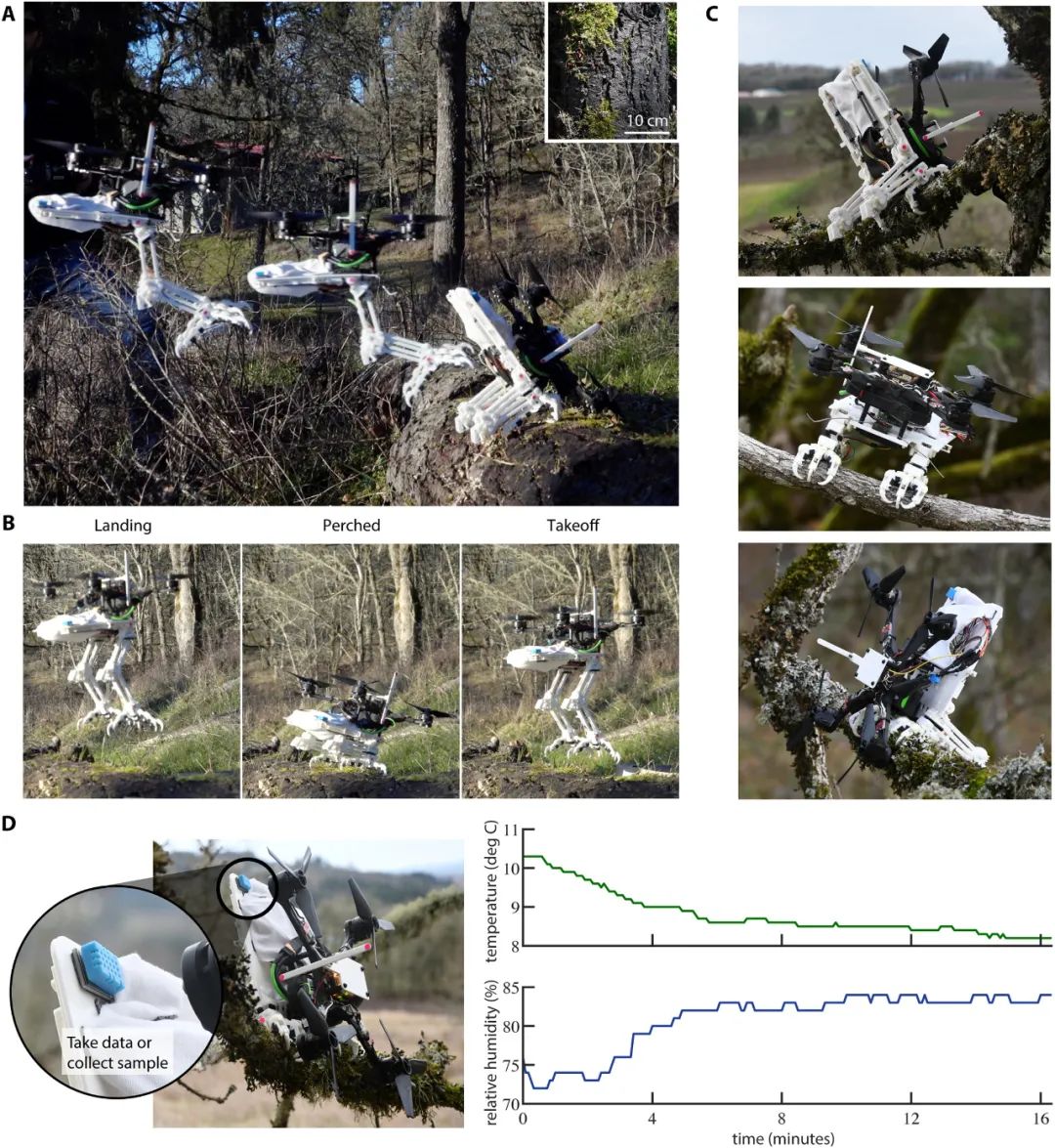
最后,为了验证 SNAG 在真实环境中的稳健性,研究人员在森林中测试了 SNAG 在树枝上着陆和起飞的能力。
总的来说,SNAG 表现非常出色。安装了 SNAG 的机器人有很多可能的应用,包括搜救和野火监测,也可以附加到无人机以外的技术上。未来,研究人员可专注于机器人着陆前的一些研究,比如提升它们的态势感知和飞行控制等。https://news.stanford.edu/2021/12/01/bird-like-robot-perches-grasps/https://www.youtube.com/watch?v=JEKttzocgwU





 下载APP
下载APP