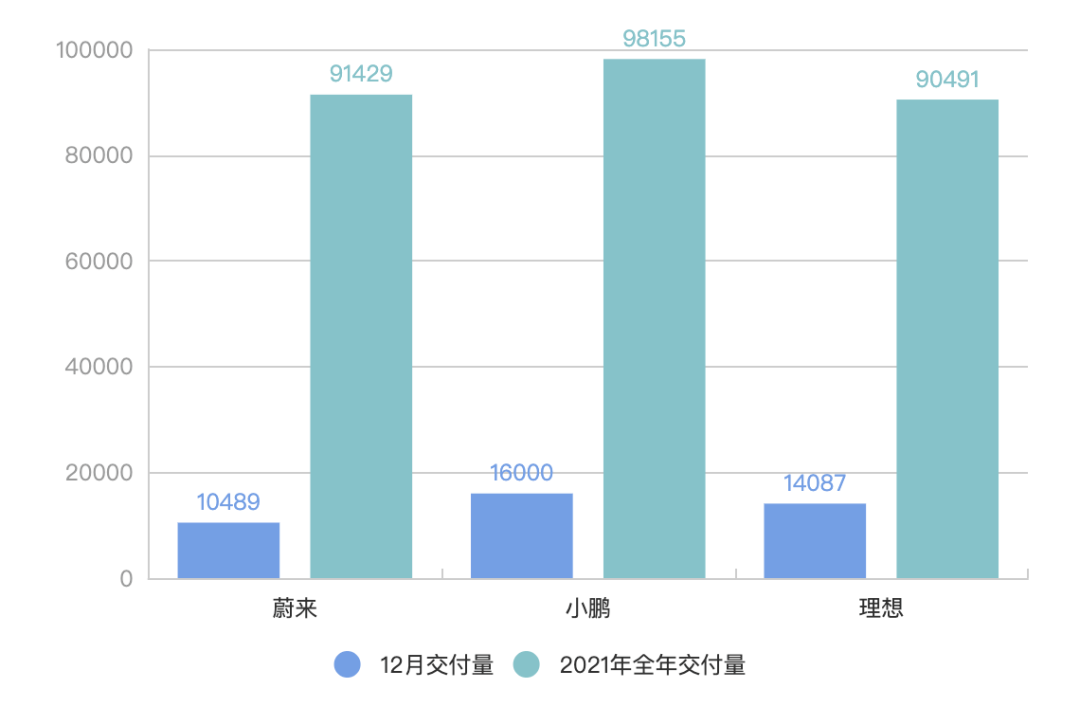
AEB测试「霸榜」!理想如何靠全栈自研逆袭成功?新智元关注共 3628字,需浏览 8分钟 ·2022-01-23 10:32 新智元报道 编辑:桃子 好困【新智元导读】一场测试,一百多辆车,理想ONE凭什么力压群雄拿下第一?2022年1月11日,《懂车帝》公布了最新一期上百款车型的AEB测试成绩。 在这一百多辆车里,理想ONE位居第一。 李想对此给出了答案:全栈自研。 1月11日,理想汽车CEO李想发布微博长文,复盘了理想ONE智能驾驶研发在2021年的一些成绩。 「在懂车帝年度AEB(主动安全)测试中成为了冠军,也是进入决赛组里唯一有能力准确识别横向车辆和两轮车的车型,自从能够开展全栈自研以后,团队在算法和控制的进步速度远远超过了我的想象。」上下滚动查看 那么,AEB为何物?在现实中,这个AEB怎么起作用呢? AEB,全称Autonomous Emergency Braking,也就是自动紧急制动系统。它既是一项安全功能,同时是高级辅助驾驶系统的重要功能之一。 当车辆遇到突发情况时,AEB可以预警并采取制动,以此来避免事故发生或是降低事故损失。 正巧,微博上最近有一条视频特别火:一辆白色小轿车突然并线,不仅没打转向灯,而且把视频车给撞了。 重点来了! 在回看事故录像时,白车司机不停地在问自己撞的车是哪一辆,搞得视频车车主一时间竟不知道该如何回答。 经过视频车车主不懈的努力,在解释了不下十遍之后也还是没能让对方理解:拍摄视频的车就是自己的车,也就是被撞的车。 这时,假设视频车有AEB的话,很大程度上就能避免这种「高血压」的场景了。 白车突然并入,AEB发出警报,如果司机没反应,系统就直接触发紧急制动,最终避免了碰撞。 重新回到最开始的AEB测试,为了选出年度最强车型,懂车帝分别以时速40,50和60公里进行了加测。结果,在三种不同速度下全部通过只有理想ONE一台。 尤其是60km/h的测试,理想ONE不仅提前发出预警,而且制动力度非常大。 除了在电动两轮车追尾的测试中表现不错以外,理想ONE对遇到儿童行人等复杂状况,同样能够做到很好的识别和制动能力。 不难看出,采用全栈自研的理想在这场AEB主动安全测试中,其自动紧急制动性能大幅提升,均以最佳成绩通过。究其原因,正是2021年12月,理想通过OTA升级并交付了完整AEB功能后才取得如此优秀的成果。 那么,理想为何要走上自研的道路呢?放下「黑盒」,走向「自研」此前,理想采用的是来自Mobileye的Q4芯片和辅助驾驶方案。 虽然在前期帮助理想实现了快速的量产,然而作为封闭系统的Mobileye,并不会提供感知算法和数据,而车企也就很难自行实现系统的快速迭代。 就拿AEB来说,市场上多数车型搭载的也采用了来自于供应商的打包方案。 这个方案主要采用毫米波雷达进行障碍物识别,可以称得上是「基础AEB」。 来源:EE Times但如果仅仅依靠雷达,就很容易受到误报的干扰,比如它会把停放在旁边的汽车识别成危险物体。这就是为什么一些具有AEB功能的汽车,经常会收到假碰撞警告的原因。 那么,在AEB中引入视觉,是不是就能把问题解决了? 确实,「毫米波 + 视觉融合」方案的可以更好地实现对行人、骑行者的探测,保障行人安全。 然而如果还是求助于供应商,虽然可以得到成熟的方案,但是依然没有解决「黑盒」问题,也就是说车企们仍旧不能按自己的意愿重新定义能力。 为了突破这一难题,理想毅然选择了全栈自研的视觉融合方案。 那么首先,需要一套支持「自研」的芯片。 2021年5月,理想正式换装了两颗地平线征程3芯片,其物理算力可达10 TOPS,感知计算FPS性能相当于30 TOPS的GPU,而计算功耗仅为5W。 而征程3最大的特点就是 「允许车企自主开发感知、控制算法」。 当然,光靠硬件是不够的,算法也得跟上。 为此,理想在AEB的研发中,引入了特斯拉提出的「影子模式」。 通过在车辆系统中部署一定的逻辑,理想的开发人员就可以时刻盯着那些回传的数据进行分析,依次判断哪些行为是正确的,哪些是不正确的。之后,把不应该触发的全都捋出来,从而实现算法的优化。 全栈自研的另一个优势便是,理想可以有针对性地对实际路况和特殊场景进行微调,由此让车辆更加适应国内的交通状况。 来源:极果网 此外,理想在AEB的研发上采用了「双轮驱动」的模式。 一方面在交付前通过国标测试C-NCAP;另一方面通过通过数据回传,将用户实际用车场景发生的问题进行汇总分类,进一步优化。 依靠大量的真实场景用户数据,理想的视觉融合AEB在上线之后也会持续不停地迭代,从而最大程度地避免事故的发生。 这么看来,理想自研的AEB系统能在更加符合国内复杂交通状况的测试中夺得第一,也是意料之内了。 有了稳定可靠的AEB和自主可控的芯片,理想也就有了把自研的「大刀」挥向NOA导航辅助驾驶系统的能力。 6万车主免费用的NOA相比于现在受到热捧的NOA、NOP等领航辅助驾驶功能,AEB更多被归类为辅助驾驶中的基础功能。 理想的NOA能做什么? 可以一键激活自主规划路线,自动驶入匝道、自主制定行驶策略、自动超车等功能。 这一全栈自研的导航辅助驾驶系统,不仅全系车型免费配置,而且6万多车主可以享受到更安全、更便捷的驾驶体验。 智能化升级,是2021款理想ONE最大的亮点。 这款车型采用了博世最新一代毫米波雷达,探测距离超过110m,拥有更强的感知能力。 此外,理想ONE也将摄像头升级为800万像素,有效可视距离达到200米,识别精度达到4K级别。 来源:懂车帝 更细腻的画质和更优异的暗光环境可以让理想ONE的辅助驾驶系统能更早发现危险⽬标。 摄像头还支持120度水平视场角,不仅让近距离盲区会更小,安全性大幅提高,而且横向探测范围更广,对匝道和大型弯道有更强的感知能力。 有了更强的硬件基础,再搭配自研的感知算法,理想ONE不仅可以识别红绿灯和桩桶,还可以对路肩进行有效的识别。 此外,这款车还采用了⾼德的⾼精地图,赋予了理想ONE超视距的感知能⼒。 再加上理想自主研发的定位算法,在⾼精度地图全覆盖路段,⻋辆可以更精准地出⼊匝道,超⻋并线以及主动调速。 目前,标配自研的算法2021款理想ONE已经可以识别高速路交通事故现场和道路施工现场,可以提前给车主提示,避免和减少重大交通事故的发生,大大提高了家庭出行的安全。 总之,AEB自动紧急制动系统和NOA是导航辅助驾驶系统理想全自研能力的集中体现。理想照进现实自研能力行不行,还得靠数据说话。 2021年年底,理想ONE变得格外抢眼。根据理想公布12月交付数据显示,共交付14,087辆理想ONE,再创交付量新高。 过去一年,小鹏、蔚来、理想的全年交付量分别是98155辆、91429辆、90491辆,均超过了9万辆。 可以看出,近年来,智能驾驶已经成为汽车的一大销售亮点。 作为智能驾驶功能的最先入局者,特斯拉于2019年6月最先推出了NOA功能,给人们带来关于智能驾驶的全新体验。 但是,在实际应用中,特斯拉的NOA方案并不完全适用于中国复杂多变的道路场景。 在特斯拉的引领下,国内造车势力也在此纷纷布局。 无论是软件,还是芯片、技术平台等硬件,车企们并不想上交造车的主动权。来源:汽车大事记 比如,小鹏汽车也是自创立之初便坚持全栈自研的技术路线。除了基于车端感知、定位、规划和控制等模块,在数据通路、分布式网络训练等方面都坚持自研。 还有蔚来也在2020年曾表示规划自主研发自动驾驶计算芯片。除此之外,长城汽车、吉利汽车等都下场搞自研。 但必须要明确的是,自研并非易事。况且自动驾驶技术的研发是当前各个车企的必经之路,理想也不能放弃。 理想汽车所展现出来的是全方位自研,包括数据的收集、处理、训练,算法的迭代。 2020年9月,理想先是和Mobileye说「Bye,Bye」。 2021年6月,开始交付搭载了地平线芯片的2021款理想ONE。 2021年9月,知乎拆车实验室的测试结果显示2021款理想ONE的AEB功能无法在测试假人面前有效刹停。 同月,理想回应称,测试结果属实,主要原因是全栈自研的辅助驾驶系统尚未向用户推送,所测试车辆尚未经过系统升级。 2022年1月,理想ONE在懂车帝的测试中不仅进入了决赛,甚至还战胜了以安全著称的沃尔沃。 此次理想在AEB代表的智能驾驶辅助方面,不仅实现了对自己,也实现了对大家固有认知的「逆袭」。 所以说,过去一年,是理想智能驾驶急速进化的一年。 只有掌握了全栈自研的主动权,才能够成为本轮科技革命和汽车产业变革的最后赢家。 理想的全栈自研,最终让理想照进了现实。 浏览 40点赞 评论 收藏 分享 手机扫一扫分享分享 举报 评论图片表情视频评价全部评论推荐 逆袭公子龙0逆袭!沉默王二0Python自动化测试全栈+性能测试全栈,挑战年薪40W+软件测试test0Python自动化测试全栈+性能测试全栈,挑战年薪40W+爱码小士0逆袭了......JavaGuide0从后端研发到全栈开发,是不是最美逆行者?AlwaysBeta0从后端研发到全栈开发,是不是最美逆行者?w3cschool0技术不行还说Java卷!靠468页SpringBoot企业级项目实战成功逆袭愿天堂没有BUG0底层程序员,逆袭!程序IT圈0NLP菜鸟逆袭NLP菜鸟逆袭记:地址:Github地址:https://github.com/km1994/AwesomeNLPdGitee 地址:https://gitee.com/km601/AwesomeNLP_gitee x介绍:【NLP菜鸟逆袭】分享 自然语言处理(文本分类、信息抽取、知识图谱点赞 评论 收藏 分享 手机扫一扫分享分享 举报













 下载APP
下载APP