
大规模神经网络的训练优化入门
极市导读
大规模神经网络训练一般会涉及到几百个分布式节点同时工作,模型的参数量以及运算量往往很大,作者认为在这个task下当前的工作主要归结为以下三种:对通信本身的优化,神经网络训练通信的优化,大规模下如何保持精度。>>【重磅】珠港澳首届AI人工智能大会将在珠海召开,免费门票限时领取中!
之前一段时间接触了大规模神经网络训练,看了不少优秀的工作,在这里当做笔记记下来。同时也希望可以抛砖引玉,和各位大佬交流一下这方面的现有工作以及未来的方向
(1)大规模训练工作的几种类型
大规模训练和普通分布式训练还是有区别的,主要体现在大这个字上面。一般来说会涉及到几百个分布式节点同时工作,模型的参数量以及运算量往往很大(比如BERT,GPT3等等)
我认为在这个task下当前的工作主要归结为以下三种
对通信本身的优化 神经网络训练通信的优化 大规模下如何保持精度
其中1主要是通信库的优化,严格来说和神经网络本身并没有关系,这里面比较优秀的工作有经典的ring-base all-reduce(最先在百度的工作中被用于神经网络训练baidu-research/baidu-allreduce(https://github.com/baidu-research/baidu-allreduce),腾讯的分层通信(https://arxiv.org/abs/1807.11205),以及sony的2D all-reduce(Massively Distributed SGD: ImageNet/ResNet-50 Training in a Flash(https://arxiv.org/abs/1811.05233)。
而第2部分的工作都针对于如何在神经网络这个训练模式下做通信优化。这方面的思路很广,比如商汤提出的稀疏通信(https://arxiv.org/abs/1902.06855),杜克大学提出的TernGrad (TernGrad: Ternary Gradients to Reduce Communication in Distributed Deep Learning(https://arxiv.org/abs/1705.07878)
第三部分和前两个不同,主要关注点在于精度而非性能。在大规模训练的情况下,一种常见的做法是做数据并行,即把batch size设的很大,那么原来跑90个epoch需要迭代1000次的话,把batch size扩大10倍,就只需要迭代100次,即参数的更新次数减少了很多。如何在这种情况下收敛到小batch size也是一个棘手的问题。在这个领域比较好的工作有face book的线性倍增学习率(https://arxiv.org/pdf/1706.02677.pdf)以及伯克利尤洋的LAR算法(https://arxiv.org/pdf/1709.05011.pdf)
打一个广告:尤洋已经从伯克利毕业,目前在新加坡国立大学成立了实验室。目前正在火热招生,有兴趣的同学欢迎投递简历(邮箱:youy (at) comp (dot) nus (dot) edu (dot) sg)。如果害羞不好意思直接联系大牛,可以私聊我,我帮你转发~
I:对通信本身的优化
(懒得写了,偷个懒)
我对这方面了解十分有限,推荐大家读腾讯团队写的介绍(兰瑞Frank:腾讯机智团队分享--AllReduce算法的前世今生(https://zhuanlan.zhihu.com/p/79030485)
II:神经网络的通信优化
分布式神经网络训练目前主要有两种模式:数据并行和模型并行。
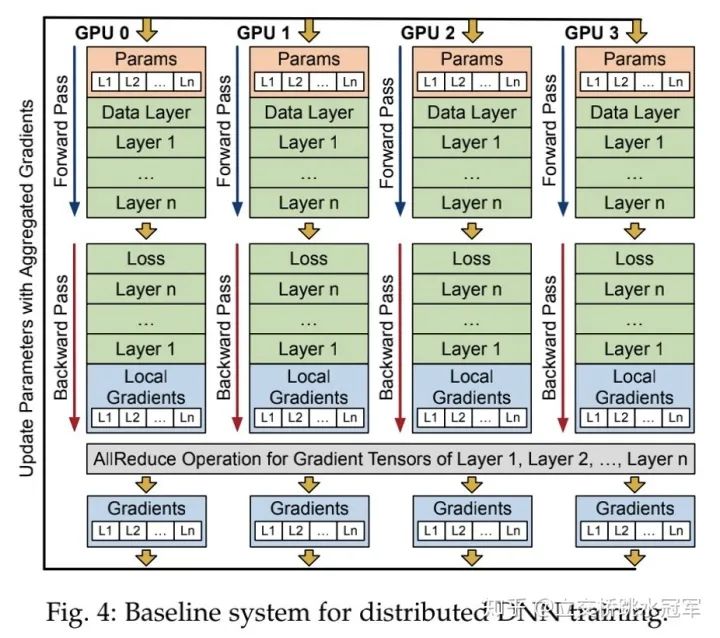
数据并行比较简单,下面这张图是经典的数据并行的同步训练的场景:所有节点(即图中的GPU0-GPU3)都保存整个模型(粉色的Params),每次迭代,不同的节点会得到不同的数据,每个节点用得到的数据做正向和反向计算,得到每个参数的梯度。之后整个分布式系统会同步所有节点的梯度,即每个节点的local gradient做一次all reduce操作,得到全局的global gradient(最下面蓝色的Gradients)。每个节点用这个global gradient更新参数。
显而易见,数据并行基于一个假设:每个节点都可以放下整个模型。这个假设在如今某些模型上(说的就是你,GPT3!!!)是不合理的,因此我们还需要模型并行,即不同节点负责计算神经网络模型的不同部分(比如有一个100层的网络,那么我们可以让第一个节点存储前50层的参数,并负责计算前50层,另一个网络则负责后面50层)
下面这张图摘自英伟达的Megatron-LM: Training Multi-Billion Parameter Language Models Using Model Parallelism(https://arxiv.org/abs/1909.08053)。在这里演示了如何用两个节点去算连续的两个矩阵乘法。
我们要做的操作是首先算出Y=GeLU(XA),再算Z=Dropoug(YB)。其中,X,A,B都是矩阵,而且矩阵规模都很大
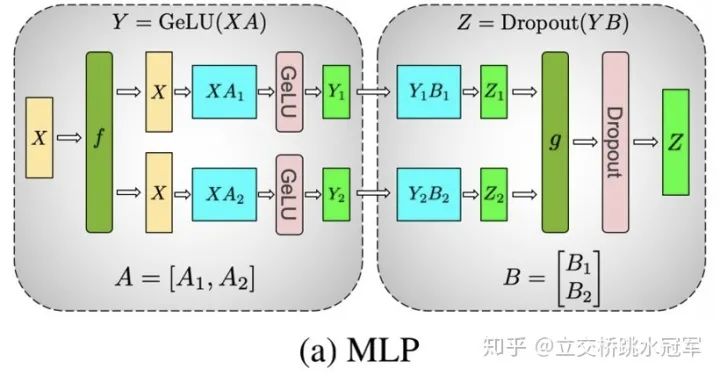
假设我们希望用两个分布式节点完成这个计算,那么我们可以把矩阵A按colum切成A1,A2两份,分别存到节点0和节点1中。同时我们也把矩阵B按行切成B1,B2两份,分别存到节点0和节点1中。然后我们将X做一个broadcast(图中f部分),分别发送到两个节点上,算得Z1和Z2,在做一次all reduce(图中g部)将Z1和Z2相加,得到最终的Z。
这里面有一个很巧(也很绕)的地方,那就是为什么A要按列切,B要按行切?我们可不可以把它们反过来?答案是:最好不要,因为如果反过来,的确计算上可行,但是我们就会增加一次通信(即算Y=XA的时候我们就要做一次通信),这样显然速度会变慢。
展开来讲,数据并行和模型并行也可以细分
数据并行可以分为
同步式数据并行 异步式数据并行
同步式比较简单,就是我最上面那张图演示的。
异步式复杂一些:我们很容易发现,最后全局all reduce gradient的时候会耗时比较多,分布式系统越大,消耗越大,而且这样做还有一个隐藏的假设:分布式系统是homogeneous的,即每个分布式节点不会差的很多。举个例子,如果每个节点实力相当,那么都会算10s就可以结束一个iteration,那么我们10s之后就可以开始一次通信。然而如果有一个节点(害群之马)需要算100s,那么其他节点算完之后就得干等它90s才能做通信,那么是对资源的极大浪费
想想看,你的老板绝对不允许你(打工人)干坐着什么事都不干,只因为你的进度被别的同事block了。研究员也是如此,于是为了解决上面的问题,引入了异步式通信。简单来说就是如果遭遇了上面的情况,快的节点等一会儿就不等了,他们之间做一次通信然后接着算下一轮。这个节点什么时候算好什么时候再和其他人一起all reduce梯度。
这样做快是快了,但引入了另一个问题,那就是每个人的参数都不一样了,那么他们根据不同的参数算得的梯度再去做all reduce就有一些不合理,就会导致神经网络精度受损。
有很多工作尝试解决异步并行带来的精度损失,不过据我所知并没有特别general的方法,因此异步并行如今也很少被使用了
模型并行可以分为
粗粒度并行 细粒度并行
它们的区别在于并行的层级:粗粒度每个节点会算不同的layer,而细粒度会将layer也做拆分
粗粒度并行比较优秀的工作有google的GPipe(https://arxiv.org/pdf/1811.06965.pdf)
在粗粒度并行中,每个节点负责不同的layer,但是layer之间是存在数据依赖的,这就导致在之前的节点算的时候,后面的节点干等着。GPipe提出把数据按照batch纬度做切分得到多个micro batch,这样第一个节点先算第一个micro batch(图中F[0,0]),把算到的结果发给第二个节点去算,于是下一个时刻第二个节点在算第一个micro batch(F[1,0]),而第一个节点开始算第二个micro batch(F[0,1])

细粒度并行比较好的工作除了我之前介绍的Megatron之外,还有GShard(GShard: Scaling Giant Models with Conditional Computation and Automatic Sharding(https://arxiv.org/abs/2006.16668)
这个工作主要的贡献在于提供了一套原语,允许最高层的开发者(写python的人)通过简单的方式指导代码生成(即编译器)生成对应的模型并行的代码
推荐阅读
