点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达

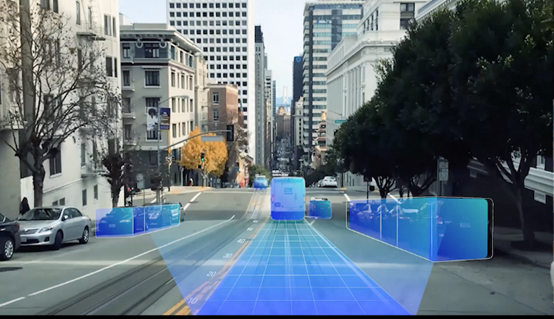
雷达是自1930年代以来我们一直使用的传感器。最初,它被军方用来检测敌机。它在战争期间一直是一个巨大的传感器,被各方使用。今天,它是一种用于自适应巡航控制的车辆以及用于障碍物检测的自动驾驶车辆的技术。让我们看一下雷达的工作原理,该传感器的优缺点是什么以及如何将其用于检测物体的位置,类别和速度。

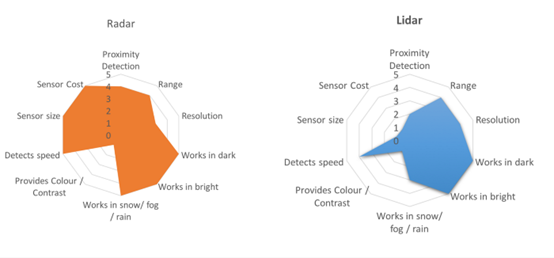
诸如Tesla或Comma.ai之类的公司使用雷达与摄像头相结合来确保只有视觉系统才能实现。其他制造商将RADAR与LiDAR和摄像头结合使用,获得了出色的传感器融合模块。发明雷达时,比较麻烦,但是今天,它适合您已经拥有的所有车辆,通常位于前保险杠的后面。关于雷达的另一个重要论点是它的价格。它的价格可能高达500美元,但涨幅不大。当用于自动驾驶时,雷达是一种出色的互补传感器,可以解决其他传感器的弱点。总而言之,雷达可以直接测量物体的速度,并且可以在白天,夜晚,雨天,雾天,大雪等不同场景下工作,而其他传感器可能会遇到问题。
雷达如何工作
RADAR代表无线电检测和测距。它通过发出电磁(EM)波来工作,该电磁波在遇到障碍物时会反射。由于它使用EM波工作,因此可以在任何条件下工作。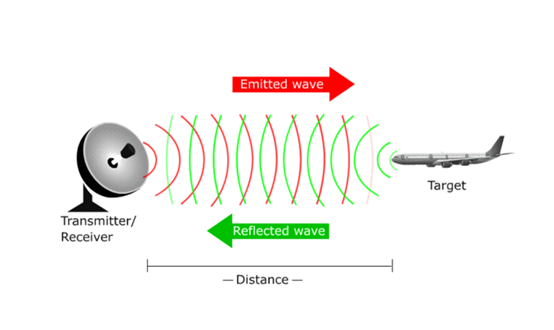
我们必须了解的一件事是,就像在高中物理中一样,我们正在处理波形。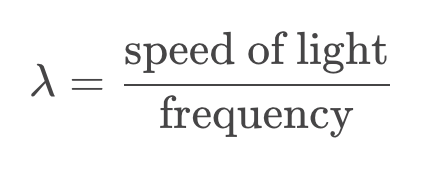
例如,每个波都有一个波长,一个频率,一个振幅和一个相位。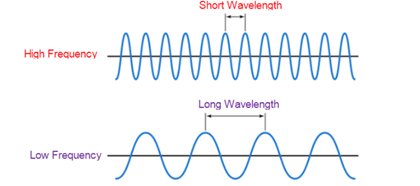
有许多不同类型的雷达,其中最流行且与我们的案例有关的一种称为FMCW-调频连续波。为什么它受欢迎并且与我们的案例相关?这种类型的雷达辐射连续功率。它可以在很小的范围内检测障碍物,并且可以同时测量物体的范围和速度。该波看起来像这样:这是一个称为锯齿的信号,其频率可以随时间增加或减少。几分钟后,我们将了解多普勒效应的含义。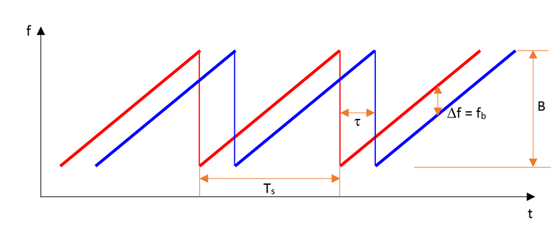
· 功率放大器—一种放大信号的东西,以便RADAR可以在远距离(300m)看到。· 天线—一种将电能转换为电磁波的东西,该电磁波被发送到特定的方向并被反射(返回到天线)。· 处理器-就像在任何计算机中一样,处理器可以帮助进行计算,我们甚至可以处理信号来进行机器学习,聚类,跟踪等。那我们可以检测到每个物体吗?当发射的波到达物体时;它可以检测出来。但是如何检测?我们注意到,它并不总是完全反射回RADAR的天线。反射指数称为雷达横截面(RCS) 用于并考虑到:目标的几何形状、雷达的方向、频次、靶材。因此,RCS是一种考虑了所有这些因素的指标。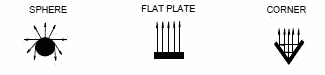
现在考虑一下隐形飞机的以下图像。这种类型的飞机可能完全未被RADAR探测到,这是因为其几何形状设计可将波向其他方向偏转,其光滑的表面以及旨在吸收波的非反射性涂料,因此它们不会返回发射器。
由于反射率和其他因素,可以使用RADAR对障碍物进行分类。如何估算障碍物的范围?当我们想使用雷达时,涉及许多不同的方程式。实际上,这是100%的信号处理。但是,数学很简单,在数学上并不难。这是一个示例-假设我们前面有辆汽车,我们需要知道它与我们之间的距离。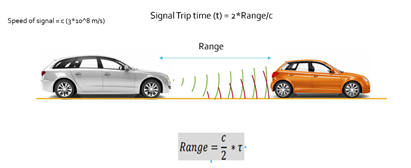
我们知道信号的速度,因为它在空中传播。c = 3×10⁸。我们可以测量信号返回的时间:T。那么,达到目标所需的时间为T / 2。范围只是R = c * T /2。更复杂(接近现实)的计算将用RADAR的某些参数(例如带宽或线性调频周期)的组合代替T。并且这不是计算获得,而只需要硬件参数即可。那么如何估算物体的速度?假如您在驾车行驶过程中得到了一张超速罚单,您准备了解原因了吗?这就是所谓的多普勒效应。请看下面的图片: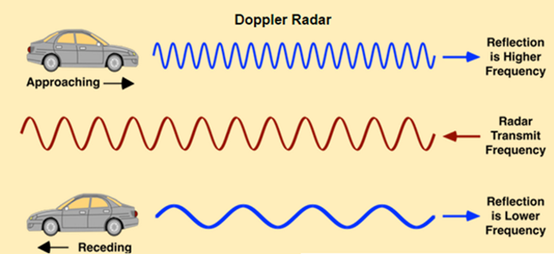
如您所见,波浪完全不同。波是雷达发射的信号。顶部的蓝波是正在接近的车辆的反射波-波长很小。底部的蓝色波是远离我们的车辆的反射波-波长很大。在计算频率偏移时,我们可以确定车辆的速度和方向:这称为多普勒效应。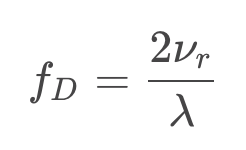
多普勒频移方程
我们知道:fD-频率偏移(已测量,未保留详细信息)λ—波长,因此,我们可以确定车辆的速度νr。如何解释海浪?RADAR对我们没有输出任何逻辑信息-它显示了波动。我们在此波中唯一可以看到的是幅度和频率。最终任务是关于使用快速傅立叶变换(FFT)将该波转换为可解释的信号。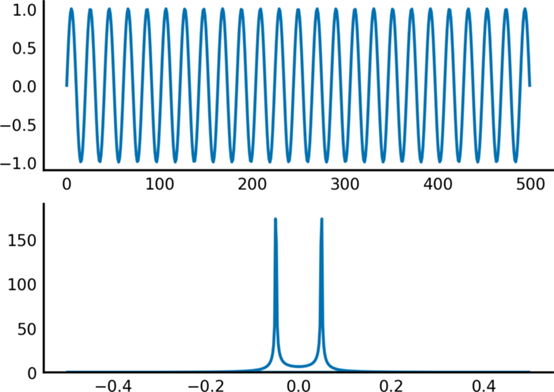
我们将跳过有关快速傅立叶变换的说明。如果您在学校没学过,可以在这里获得介绍。大多数人只调用fft()函数。需要了解的一件事:它有助于我们将波从时域转移到频域。一旦进入频域,我们可以注意到一些波在不同的频率处反射,并将它们与其他波分开。每个峰代表检测到的障碍。
要知道的一件事是,雷达是一种非常嘈杂的传感器。您会看到一个明显的障碍,但是RADAR输出5或6次检测。您看不到障碍物,但是出于未知原因,雷达显示了一些检测结果。我们称之为噪音。噪音来自各种事物。一罐苏打水可以反射波浪并看起来像是物体。通常,这是环境噪声。为了过滤噪声,我们使用一种称为SNR或信噪比的度量。雷达输出波和振幅。幅度越高,检测的可能性越高。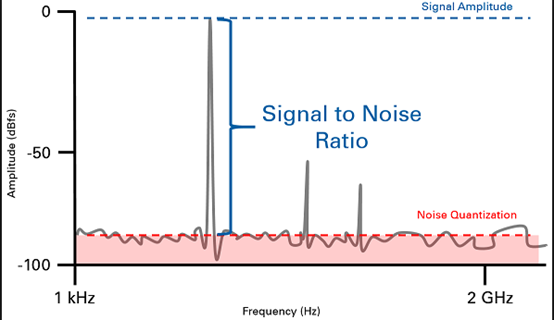
杂乱无章的噪声
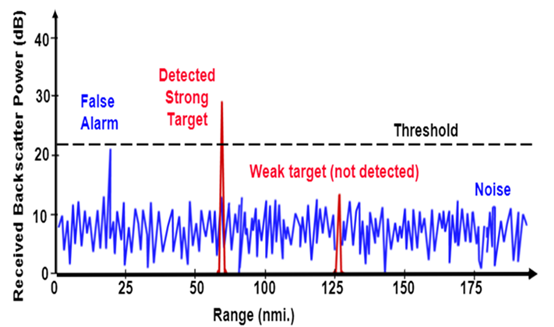
接下来发生的事情称为混乱或阈值化。我们可以删除较弱的检测,而仅保留最能反映出问题的检测。诸如动态杂波之类的先进技术是可能的。
最后,我们能够检测到障碍物并估算其速度。但是我们得到的仅仅是反射波,这要归功于FFT。我们可以输出许多结果,并且可能需要对输出进行聚类。聚类算法是基于距离计算的算法,例如欧几里得聚类或K均值聚类。
RADAR是一个非常强大的工具。由于噪声的影响,它不能真正在自动驾驶环境中单独使用。但它可以与相机或LiDAR结合使用,功能非常强大。它可以在许多条件下工作,并且可以直接估算范围和速度。通过一些工作,它甚至可以分类。我们没有提到的一件事是,雷达可以看到建筑物和障碍物的下方。如果我们要在近距离内估计环境,则此功能非常强大。RADAR还可以预测即将发生的交通事故,特斯拉已经使用RADAR挽救了许多生命。 End
End
下载1:OpenCV-Contrib扩展模块中文版教程在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。在「小白学视觉」公众号后台回复:Python视觉实战项目31讲,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
