
清华校友用发夹做机器人,能地上跑水里游,快速移动事半功倍!

大数据文摘授权转载自机器人大讲堂
模仿小动物的机器人很常见,你见过模仿发夹的么?
没错,就是女孩子用的发夹,可以掰开再扣上的这种。
哥伦比亚大学的学者脑洞大开,给“发夹”装上四条腿,就跑起来了:
扔进水里还能游泳嘞,而且速度还挺快:
别看它相貌平平,其实充满了科技感,它属于软体机器人的一种,基于哥伦比亚大学开发的一种发夹机制(HCM)。
研究人员指出:
这种发夹机制(HCM)结构非常简单,也非常轻巧,只需施加一点点力,就能快速在两种稳定的配置(凹陷和凸起)之间来回弹动!
这种机制不仅可以提高运动速度,而且大大减少了机器人开发的成本和复杂性!
▍给塑料条上电,快速移动事半功倍!
首先,最重要的一点就是:简单!不仅结构简单,材料简单,连制作方法也很简单。
常见的软体机器人一般是由各种弹性体、形状记忆合金等制成的,速度和强度都有限制。
与之不同的是,发夹机制仅由一根「预应力半刚性塑料条」组成,搭配一个简单的驱动装置,每次向塑料施加少量压力,整个塑料条就会做出反应,从凹陷状态迅速移动到凸起状态,放大施加的力。
这里要说明一下,半刚性塑料与我们平时见到的普通塑料不一样,它的刚性足够支持一定重量,且能够变形。
至于它是如何实现快速变形和放大力效应的,这来源于一种结构——双/多稳态结构的快速屈曲。
先来解释下什么是双/多稳态结构:
多稳态结构是一种单一结构具有多种稳定状态的可变形结构,用大白话说,只要给它一点能量,它就能转变成不同的形状,并且变形后是非常稳定的,还具有一定的承载能力;双稳态结构则是其中最简单的一种。
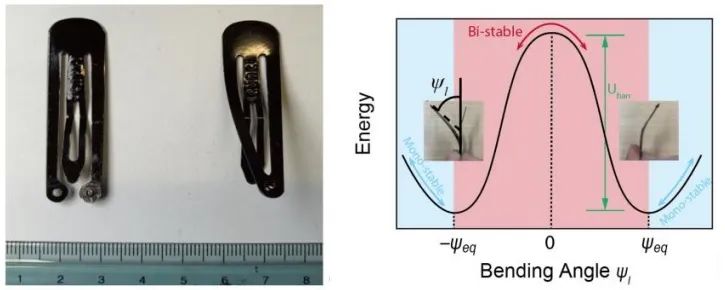
研究人员观察到,当将塑料条的两端固定在一起时,条带的横向扭转屈曲会将结构锁定成一个增加刚性和双稳定性的圆顶状结构,也就是一个发夹状的双稳态机构。

接下来,他们安装了一个小型电机,将“掰发夹”的压力施加到塑料条上。使用少量电力,伺服电机可以将塑料条变换形状,而且速度与发夹一样快。

这种机制仅需一点点电力就能产生大量的快速运动,完全达到了“事半功倍”的效果!
▍可扩展的机器人
有了发夹机制的基础,就可以制作各种各样的机器人了。
哥伦比亚大学的研究人员制作了两种机器人:会奔跑的,会游泳的。

跑步机器人的身体由两个可弯曲弹回的双稳态塑料条组成,变形时慢动作状态大概是这样:
给它安装四个脚,通过脚上的硅橡胶垫产生各向异性摩擦,机器人就能够奔跑起来:
游泳机器人使用发夹机构作为拍打的鱼尾:
机器人的奔跑速度可达313 毫米/秒,约每秒 1.6 个身体长度;游泳则更快,约每秒2个身体长度,根据该团队的说法,这些速度远高于其他相似的小型软体机器人的记录。

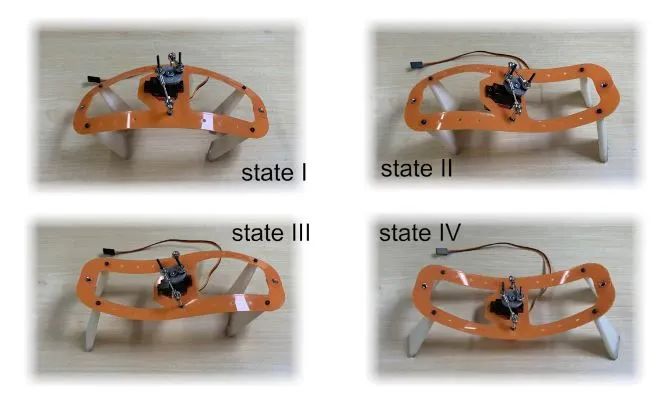
这两种机器人仅仅是个例子,发夹机制具有很好的扩展性,还能够实现更多运动状态:
如果将两个发夹机构头对头连接,就可以组装成一个四稳态的柔顺结构;
如果再变化一下形状,并分别驱动它们,就可以触发一个完全不同的机器人运动步态!
▍研究者简介
发明这个机器人的研究团队来自哥伦比亚大学。
论文计划提交给2023年的国际机器人和自动化会议,标题为“Fast Untethered Soft Robotic Crawler with Elastic Instability”。
该论文第一作者Zechen Xiong,本科与硕士均就读于清华大学,目前在哥伦比亚大学读博士学位。
论文的另一位作者,是哥伦比亚大学创意机器实验室的主任,也是团队的带头人——Hod Lipson教授,他曾被称为AI自由意志领路人。

在论文的结尾,作者表示:未来会将发夹机制与其他柔性驱动方法结合起来,例如气动驱动、形状记忆合金和电介质弹性体等,让软体机器人的开发更简单、更高效;还会尝试使用不同的材料,制作更强大的机器人。
论文传送门:
https://doi.org/10.48550/arXiv.2210.02352
