
大盘点 | 2020年2篇目标跟踪算法最佳综述
导读
我们对2020年全部计算机视觉目标跟踪方向综述论文进行了分方向梳理。
引言
在过去的一年中,计算机视觉领域出现了许多优秀的工作,并推动了相关领域的技术发展与进步。去年上半年,极市曾盘点过计算机视觉领域综述论文,并进行了分类整理,得到了很多读者的支持。因此,在2021年初,我们对2020年出现的全部计算机视觉综述论文进行了分方向梳理,希望能帮助大家学习进步。
注:文章将同步更新于Github上,欢迎大家 star/fork
https://github.com/extreme-assistant/survey-computer-vision
综述一
【1】 Correlation Filter for UAV-Based Aerial Tracking: A Review and Experimental Evaluation
标题:相关过滤无人机空中跟踪技术综述与实验评估
作者:Changhong Fu, Geng Lu
链接:https://arxiv.org/abs/2010.06255
本文共梳理94篇相关文献,由同济大学学者提出。
配备有视觉跟踪方法的基于无人机(UAV)的遥感系统已被广泛用于航空,导航,农业,运输和公共安全等。如上所述,基于UAV的航空跟踪平台已经从研究阶段逐步发展到实际应用阶段,成为未来主要的航空遥感技术之一。但是,由于现实世界中充满挑战的情况,无人机的机械结构(特别是在强风条件下)的振动以及有限的计算资源,准确性,鲁棒性和高效率对于机载跟踪方法都是至关重要的。最近,基于区分相关滤波器(DCF)的跟踪器以其高计算效率和在单个CPU上具有吸引力的鲁棒性而引人注目,并在UAV视觉跟踪社区中蓬勃发展。本文首先概括了基于DCF的跟踪器的基本框架,在此基础上,根据其解决各种问题的创新,有序总结了20种基于DCF的最新跟踪器。此外,对各种流行的无人机跟踪基准进行了详尽和定量的实验,即UAV123,UAV123_10fps,UAV20L,UAVDT,DTB70和VisDrone2019-SOT。
在无人机追踪基准[UAVDT]下,基于DCF的追踪器和深度追踪器的性能比较。图例中带有*的跟踪器是在GPU上运行的结果,该GPU利用GPU加速了卷积和池计算。当跟踪速度在单个CPU上达到红色虚线(30FPS)时,就可以满足无人机实时跟踪的要求: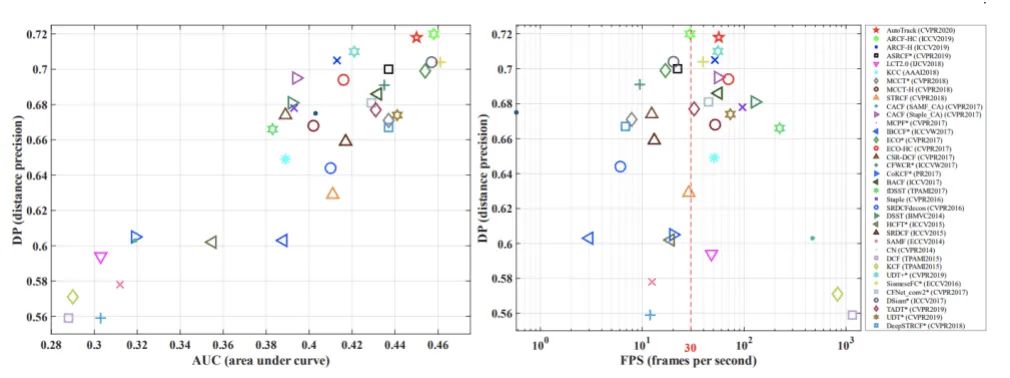
无人机平台上基于DCF的方法的一般跟踪结构,可分为训练阶段,模型更新和检测阶段:
六个基准测试中的原始属性(在线下)和新属性之间的对应关系,以及每个基准测试对每个新属性的序列号贡献: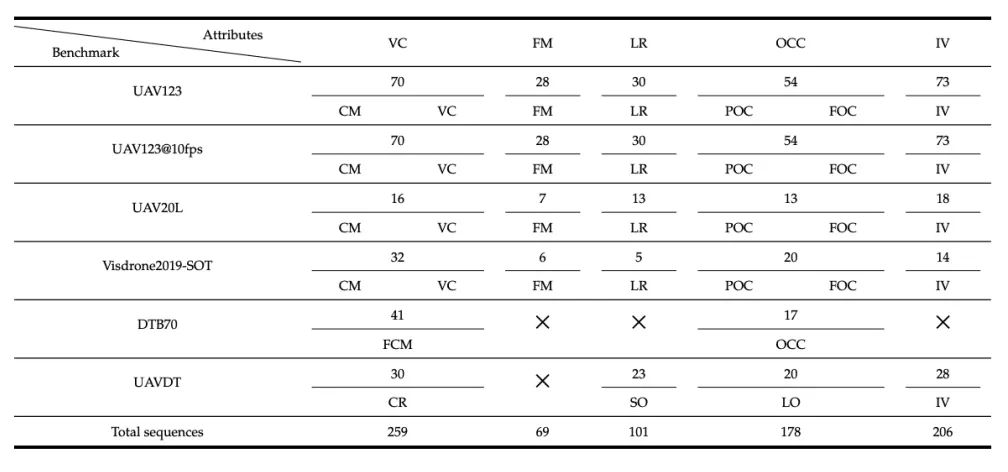
综述二
【2】 Multi-modal Visual Tracking: Review and Experimental Comparison
标题:多模态视觉跟踪:综述与实验比较
作者:Pengyu Zhang,Dong Wang,Huchuan Lu
链接:https://arxiv.org/abs/2012.04176
本文共梳理127篇相关文献。
视觉对象跟踪作为计算机视觉中的一项基本任务,近年来引起了很多关注。为了将跟踪器扩展到更广泛的应用范围,研究人员引入了来自多种模式的信息来处理特定的场景,这是新兴方法和基准的有前途的研究前景。为了全面回顾多模式跟踪,本文从不同方面总结了多模式跟踪算法,特别是在统一分类法中的可见深度(RGB-D)跟踪和可见热(RGB-T)跟踪,提供了有关基准和挑战的详细描述。此外,本文进行了广泛的实验,以分析跟踪器在五个数据集上的有效性:PTB,VOT19-RGBD,GTOT,RGBT234和VOT19-RGBT。
早期融合(EF)和晚期融合(LF)的工作流程。基于EF的方法进行特征融合并共同建模;而基于LF的方法旨在分别为每个模态建模,然后组合其决策: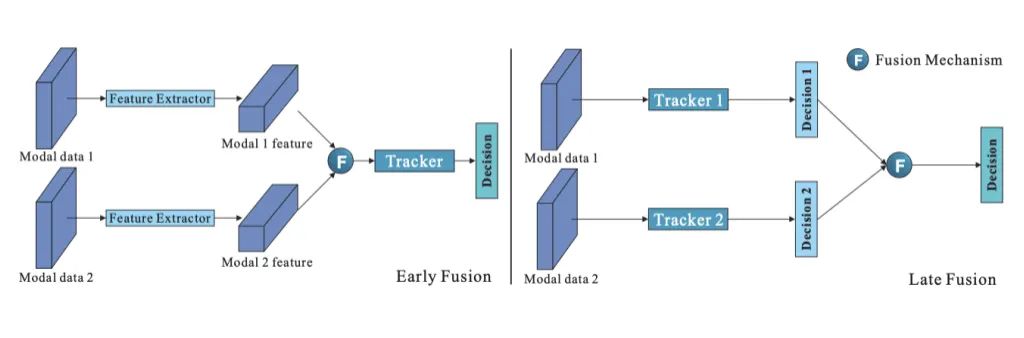
OAPF框架。应用了带有遮挡处理的粒子滤波方法,其中遮挡模型是针对模板模型构造的。当目标被遮挡时,遮挡模型用于预测位置而无需更新模板模型:
JMMAC的工作流程。基于CF的跟踪器用于对外观提示进行建模,同时考虑了相机和目标运动,从而获得了可观的性能:
