
天津大学团队研发4D打印软体机器人,承重自身40倍重量,受热后还可无限滚动
大数据文摘授权转载自学术头条
作者:郝景
责编:寇建超
提到机器人,大家会想到什么?
无论是阿西莫夫的“机器人三部曲”,还是现代科幻影片中的机器人,除了“智能”外,浑身上下无不透露着一个“硬”字。
就连看起来软萌可爱的哆啦 A 梦,或许也是由太空金属制作的。那么,你见过“软体机器人”吗?
近日,来自天津大学材料与工程学院的封伟教授团队研发了一种基于 4D 打印的热驱动“无约束管状软体机器人”,这种机器人有较高的灵活性、灵敏的感知、还可以承载 40 倍自身重量的物品,使其在运输行业具有潜在的适用性。
(来源:Matter)
该研究内容以“4D-printed untethered self-propelling soft robot with tactile perception: Rolling, racing, and exploring”为题目发表在期刊 Matter 上。
小巧玲珑,一物多用
研究人员表示,这种机器人是将液晶弹性体(LCE)按照设计好的路径,通过高温墨水直写(HOT-DIW)的 3D 打印方式打印出来。
而 LCE 是一种将液晶分子嵌入到弹性聚合物中,从而形成的一种轻微交联的液晶聚合物网状结构材料,所以它能在磁场、电场或者温度的刺激作用下发生可逆性形变。这种在外部刺激下的形状变化使时间作为打印过程的第四维度,因此这种打印被定义为 4D 打印。
机器人这种因受到刺激而做出响应的情况类似于含羞草,其被触碰的时候会“害羞”地收起叶子,而不久之后又会恢复原来的状态。
如果说含羞草是“触碰变形”,那么该论文中的机器人就是“受热变形”。
这种机器人在打印出来的时候,形状是一个矩形的薄片,而当研究人员将它的下表面加热时,机器人会自发地扭曲,形成一个类似于弹簧的小管。
图|3D 打印的 LCE 薄片在受热的情况下发生卷曲,呈圆筒状(来源:该论文)
众所周知,机器感知是人工智能领域的一个重要因素,机器人利用机器感知(比如视觉、听觉、触觉和其他感知功能)从而模拟和模仿人类的行为,而对于使用单一材料(比如该论文中的 LCE)打印的软体机器人来说,几何结构的变化是使其获得智能感知能力的机会。
在不施加外力的情况下,机器人可以朝一个方向移动,因此这一特性就使该机器人获得了触觉感知和智能探索的能力。又因为 LCE 材料的柔软性和具有曲率的圆筒状结构,使得管状机器人的运动方向在受到一定外力作用时很容易被改变。
图|机器人在一定外力作用下运动方向发生改变(来源:该论文)
这种机器人不仅可以在一定的作用力下改变方向,当遇到一些障碍时,对待不同高度的障碍,它能做出不同的响应。
封伟教授表示:“这种机器人就像有触角的昆虫,它可以跨越一个小障碍,而当障碍太高时,它就会返回。在整个过程中,它的行为是完全自发的,没有任何的人为干预。”
在理想的热环境下,机器人在理论上可以无限期地前后滚动,这个重复的过程体现了这种机器人的触觉感知的可靠性,有助于实现其具体的应用。
图|机器人越过较低的障碍(来源:该论文)
图|机器人遇到较高的障碍时会自动返回(来源:该论文)
无论在影视作品里还是生活中,机器人之间的对抗或竞赛总会让人热血沸腾,该论文中的机器人虽然看起来没什么“杀伤力”,但是让它们进行比赛却不在话下。
在轧制过程中,由于小管通过一条直线与热板保持接触,所以底部阻力的增加明显小于样条的热收缩应力。因此,具有较大驱动力的长机器人比短机器人滚动速度快,不同长度的机器人之间甚至可以进行比赛。
图|机器人之间的“跑步”比赛
同时,机器人不仅可以在平面上移动,甚至在具有一定角度的斜坡上,机器人也能毫不费力地爬上去。
研究人员表示,机器人的滚动速度会随着坡度的增加而降低,直到其速度为 0。由于较长的机器人驱动力更大,所以较长的机器人更有利于在更大的坡度上运动,这种特性使得机器人具有适应复杂地形的能力。
图|机器人可以爬坡(来源:该论文)
此外,货物运输是这种机器人的一个重要应用。研究人员在实验过程中发现,该机器人除了变形外,还存在有趣的驱动现象。机器人的空心圆柱体结构为线性物体提供了装载空间,而且在空心圆柱体的内部放置多条铜线也不会影响它的连续无约束运动。
研究数据表明,机器人所能装载的重量与其自身的长度呈现正相关的关系,长度 5cm 的管状机器人,可以拉动 1.5g 的重物(超过其自身重量的40倍);长度为 10cm 的管状机器人,可以拉动 3g 重量的物体。研究人员预测,如果样片的长度达到米级的时候,机器人的运输能力或许可以增加一个数量级。
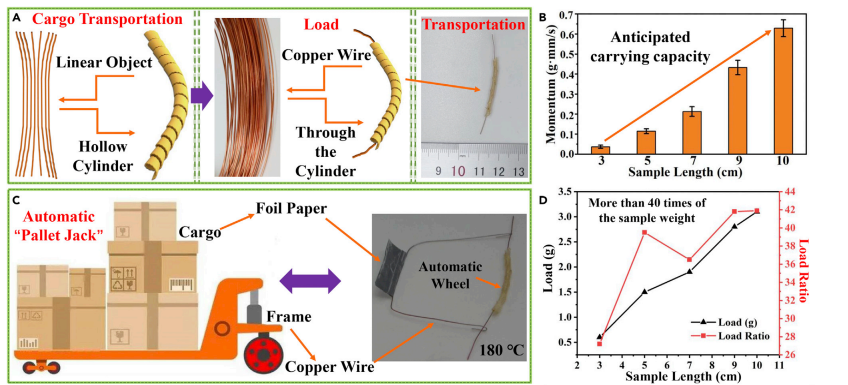
图|A.线性货物装入 LCE 机器人过程的示意图;B.不同长度 LCE 机器人的动量统计;C.自动托盘千斤顶的结构图和材料;D.载荷统计表明,不同长度的 LCE 机器人可以连续拉动距离超过 5cm,且载荷与机器人样片重量成正比。
不仅如此,机器人的运动速度也是恒定的,这种稳定的移动进一步证明了软体管状机器人对货物运输的适用性。
图|机器人可以运输货物(来源:该论文)
封伟教授还表示,这种软体管状机器人未来可能被用在小型、狭窄的地方(比如管道)或者在极端的条件下(比如 200℃ 的表面)执行工作。
柔性机器人未来可期
在我们认知中的传统“硬”机器人,是由刚体、制动器和传感器组成,但是这种系统在柔性软体机器人上无法适用,因此,对于柔性机器人的设计必须首先从材料入手。
除上述论文中介绍的 LCE 材料外,一些碳基材料比如氧化石墨烯(GO)和碳纳米管(CNTs)、介电弹性体、水凝胶材料和离子金属聚合物复合材料等都是柔性机器人材料的主要来源。
这些材料在水、光、电、热、磁、pH 等刺激下发生响应并产生各向异性的形变,因此赋予材料不同的特性,使其实现不同的结构和功能。
而我国目前的柔性机器人主要分为两种:一种是应用于工业制造的的工业柔性机器人;另一种是应用于仿生机器人的生物柔性机器人,也叫做软体机器人。相比工业柔性机器人来说,生物柔性机器人具有更加广泛的研究范围。
由于柔性机器人的各种特殊属性,使其在人机交互的时候更加安全,但是这些机器人的发展目前还处于比较基础的阶段,还没有实现大规模的应用。
而且尽管目前柔性机器人的研究取得飞速发展,但是其能量密度低、响应延迟、传感精度受限以及寿命过短制约了这些机器人在实际生活生产中的应用。
或许在未来的某一天,这些柔性机器人不仅可以在医疗、军事方面有很大的应用,更可以像“哆啦A梦”、《超能陆战队》中的“大白”一样,走进我们的生活。
参考资料:
