
讲座(4)走进人工智能


人工智能基本概念、方法和技术
基本技术:知识表示、推理、搜索、规划
人工智能的主要研究、应用领域
机器感知:机器视觉;机器听觉;自然语言理解;机器翻译
机器思维:机器推理
机器学习:符号学习;连接学习
机器行为:智能控制
智能机器:智能机器人;机器智能
智能应用:博弈;自动定理证明;自动程序设计
专家系统;智能决策;智能检索;智能CAD;智能CAI
智能交通;智能电力;智能产品;智能建筑等
人工智能新技术
计算智能:神经计算;模糊计算;进化计算;自然计算
分布智能:多Agent, 群体智能
群集智能:蚁群算法;粒群算法
集成智能:脑机接口(即BCI)
一个新兴的“智能科学与技术学科”正在兴起
【Part 1】
何谓智能
1.自然智能
自然智能
指人类和一些动物所具有的智力和行为能力
人类的自然智能(简称智能)
指人类在认识客观世界中,由思维过程和脑力活动所表现出的综合能力
智能(自然智能)现象:
1、人是怎样思考问题的?例如:树上还有几只鸟?(常识推理)
2、人是怎样横穿马路的?(常识推理和逻辑问题的形象处理)
3、人是怎样识别景物的?例如:小孩的妈妈是谁?(形象思维)
4、人是怎样实现感知、学习、思维等的?(神经系统的心智活动)
5、人是怎样产生情绪、情感的?(神经系统的心理过程)
…
定义智能的困难
从结构上,人脑有1011-12量级的神经元,广泛分布并行的巨复杂系统
从功能上,人脑具有记忆、思维、观察、分析等能力
有待于人脑奥秘的揭示,进一步认识
2.智能的不同观点和层次结构
认识智能的不同观点
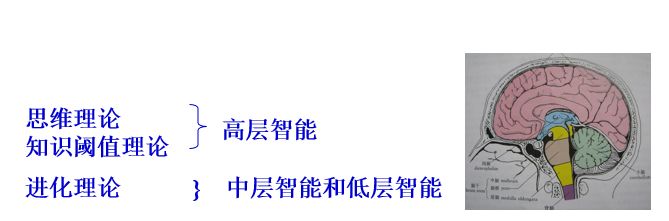
思维理论:智能来源于思维活动,智能的核心是思维,人的一切知识都是思维的产物。可望通过对思维规律和思维方法的研究,来揭示智能的本质。
知识阈值理论:智能取决于知识的数量及其可运用程度。一个系统所具有的可运用知识越多,其智能就会越高。
进化理论:是美国MIT的Brooks在对人造机器虫研究的基础上提出来的。智能取决于感知和行为,取决于对外界复杂环境的适应,智能不需要知识、不需要表示、不需要推理,智能可由逐步进化来实现。
智能的层次结构
高层智能:以大脑皮层(抑制中枢)为主,主要完成记忆、思维等活动。
中层智能:以丘脑(或称间脑,感觉中枢)为主,主要完成感知活动。
低层智能:以小脑、脊髓为主,主要完成动作反应活动。
不同观点与层次结构的对应关系
3. 智能包含的能力(1/2)
感知能力
通过感知器官感知外界的能力。是人类获得外界信息的基本途径,其处理方式有以下两种:
感知--动作方式:对简单、紧急信息
感知--思维--动作方式:对复杂信息
记忆和思维能力
记忆:对感知到的外界信息和由思维产生的内部知识的存储过程
思维:对已存储信息或知识的本质属性、内部知识的认识过程
思维方式:
抽象思维(逻辑思维):根据逻辑规则对信息和知识进行处理的理性思维方式。例如,逻辑推理等
形象思维(直感思维):基于形象概念,根据感性形象认识材料对客观现象进行处理的一种思维方式。例如,图像、景物识别等
灵感思维(顿悟思维):是一种显意识和潜意识相互作用的思维方式。例如,因灵感而顿时开窍
3. 智能包含的能力(2/2)
学习和自适应能力
学习:是一个具有特定目的的知识获取过程 ;是人的一种本能。不同人的学习方法、能力不同
自适应:是一种通过自我调节适应外界环境的过程;是人的一种本能。不同人的适应能力不同
行为能力
含义:是人们对感知到的外界信息作出动作反应的能力
信息来源:由感知直接获得的外界信息
经过思维加工后的信息
实现过程:通过脊髓来控制
由语言、表情、体姿等来实现
何谓人工智能
定义方法
典型的4种定义方法:类人、理性、思维、行为
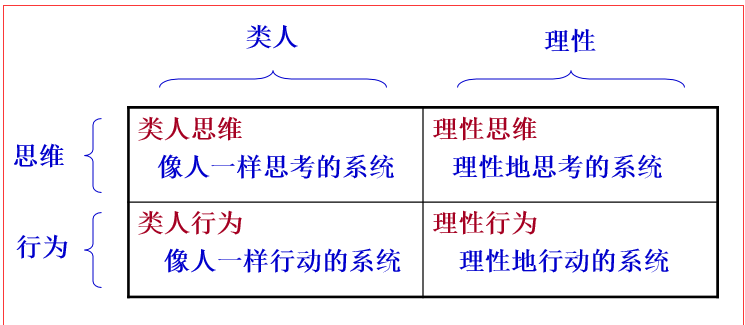
1、 类人思维方法
类人思维方法也称为认知模型方法,它是一种基于人类思维工作原理的可检测理论来定义智能的方法。
典型代表是贝尔曼(Bellman)于1978年提出的定义:人工智能是那些与人的思维、决策、问题求解和学习等有关活动的自动化。
认知科学,研究人类感知和思维信息处理过程,它把来自人工智能的计算机模型和来自心理学的实验技术结合起来,试图创立一种精确而且可检测的人脑思维过程的工作模型。
如果能把上述所得到关于思维的足够精确的模型用计算机程序表示出来,并且该程序的输入/输出和实时行为能够与人类相一致,那就说明该程序的某些机制可能是按照人脑思维模式运行的。
这方面的典型例子是艾伦.纽厄尔(AllenNewell)和赫伯特.西蒙(Herbert Simon)等人于1960年研制了通用问题求解(generalproblem solving,GPS)程序。
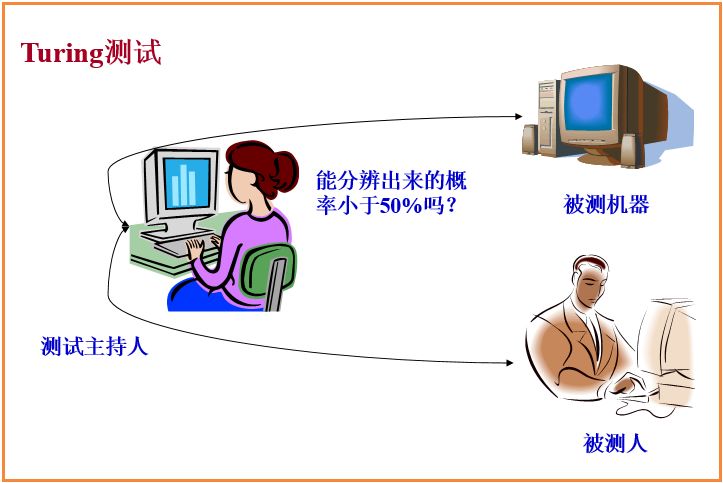
类人行为方法也称为图灵测试方法,它是一种基于人类自身的智能去定义一个机器或系统是否具有智能的方法。
典型代表是库兹韦勒(Kurzweil)于1990年提出的定义:人工智能是一种创建机器的技艺,这种机器能够执行需要人的智能才能完成的功能。
按照图灵测试要求,一台计算机要能够通过,至少应该具有以下能力:
(1)自然语言处理。实现用自然语言与计算机的交流。
(2)知识表示。存储它所知道的或听到的知识或信息。
(3)自动推理。运用存储的知识或信息来回答问题,并提取新的结论。
(4)机器学习。能适应新的环境,并能自我获取新的知识。
如果还需要测试被测对象利用视频信号的感知能力和传递接受物体的行为能力,即所谓的完全图灵测试,则计算机还应该具有如下能力:
(5)计算机视觉。可以感知物体。
(6)机器人技术。可以操纵和移动物体。
2、类人行为方法
3、 理性思维方法
理性思维方法亦称为思维法则方法,它是一种基于逻辑推理定义智能的方法。
典型代表是查尼艾克(E.Charniak)和麦克德莫特(D.McDermott)于1985年提出的定义:人工智能是通过计算模型的使用来进行心智能力研究的。
计算模型主要是指能“正确思维”的逻辑学模型。古希腊哲学家亚里士多德(Aristotle)是首先严格定义“正确思维”的人之一,他将其定义为“不能辩驳的推理过程”。例如,三段论推理方法。
理性思维方法正是人工智能领域中所谓的逻辑主义观点,他们希望通过编制逻辑程序来建造智能系统。
这种方法存在两个主要问题:第一,非形式的知识用形式的逻辑符号表示不易实现,尤其是对不确定的知识;第二,原则上可以解决的问题与实际解决问题之间存在较大差异,需要考虑推理过程的控制。
4、理性行为方法
理性行为方法亦称为理性智能体方法,它是一种基于智能体定义智能的方法。
典型代表是尼尔森(N.J.Nilsson)于1998年提出的定义:人工智能关心的是人工制品中的智能行为。
这里的人工制品主要是指能够感知环境、适应变化、自主操作、执行动作的理性智能体(Agent)。按照这种方法,可以认为人工智能就是研究和建造理性智能体。
理性行为方法与理性思维方法的关系:
首先,理性行为和理性思维强调的重点不同。理性思维方法强调的是正确思维,而理性行为方法强调的则是理性行动。
其次,理性行为可以依据理性思维进行。例如,对一些能够通过理性思维能够做出正确结论的事情,实现理性行为的途径往往是先通过逻辑推理得出该行为能达到的目标和结论,然后再付诸实施。
再其次,理性行为不一定要依据理性思维进行。例如,对有些事情,即使理性思维无法证明哪些行为是正确的,而其它行为是错误的,理性行为也必须有所行动。
上述4种方法
人们都有人做了很多工作,当然在以人为中心的方法和以理性为中心的方法之间也存在着一定的争议。例如
以人为中心的方法是一种经验科学,它需要涉及到很多假设和实验证实。
以理性为中心的方法则涉及到把数学与工程相结合
人工智能的一般解释
从能力的角度:人工智能是指用人工的方法在机器(计算机)上实现的智能。
从学科的角度:人工智能是一门研究如何构造智能机器或智能系统,去模拟、延伸和扩展人类智能的学科。
人工智能的研究目标
(1)远期目标
揭示人类智能的根本机理,用智能机器去模拟、延伸和扩展人类的智能
涉及到脑科学、认知科学、计算机科学、系统科学、控制论等多种学科,并依赖于它们的共同发展
(2)近期目标
研究如何使现有的计算机更聪明,即使它能够运用知识去处理问题,能够模拟人类的智能行为。
相互关系
远期目标为近期目标指明了方向
近期目标则为远期目标奠定了理论和技术基础
AI 的 学 科 位 置
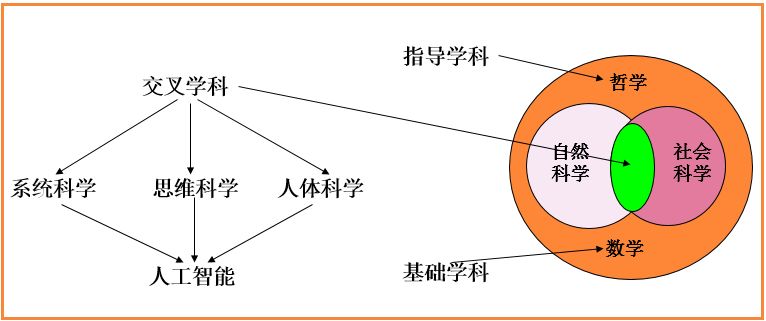
1、一门新兴的交叉学科
AI是一门新兴的边缘学科,是自然科学与社会科学的交叉学科
AI的交叉包括:逻辑、思维、生理、心理、计算机、电子、语言、自动化、光、声等
AI的核心是思维与智能,构成了自己独特的学科体系
AI的基础学科包括:数学(离散、模糊)、思维科学(认知心理、逻辑思维学、形象思维学)和计算机(硬件、软件)等
2、一个引领未来的科学技术

中国科协网站:http://www.cast.org.cn/50th/toupiao/05.html
中国网:http://www.china.com.cn/tech/kx/second5.htm
新浪网:http://tech.sina.com.cn/d/cast50/index.html
2008年11月16日,在中国科协成立50周年的新闻发布会上,经2000多万公众网上投票,评出的10项引领未来的科学技术如下:
因修饰技术
未来家庭机器人
新型电池
人工智能技术
超高速交通工具
干细胞技术
光电信息技术
可服用诊疗芯片
感冒疫苗
无线能量传输技术
3、信息时代的核心技术
在数学机械化领域。他提出的几何定理的机器证明被国际数学界称为“吴方法”。
与脑科学和认知科学的交叉研究
1. 脑科学与神经科学
脑科学:是一门研究脑与心智现象及规律的科学,其主要目标就是要揭示脑功能的本质,认识脑与智能的规律,保护脑和创造脑。
神经科学:是一门研究神经系统内分子水平、细胞水平及细胞间的变化过程,及这些过程在中枢的功能、控制系统内的整合作用所进行的学科。
脑的涵义:
从狭义方面,脑是指中枢神经系统,有时特指大脑;
从广义方面,脑可泛指整个神经系统。人工智能是从广义角度来理解脑科学的。
脑的复杂度:人脑是由巨量神经元经其突触的广泛并行互联所形成的一个巨复杂系统,是自然界中最复杂、最高级的智能系统。
现代脑科学的基本问题:
(1)揭示神经元之间的连接形式,奠定行为的脑机制的结构基础;
(2)阐明神经活动的基本过程,说明在分子、细胞到行为等不同层次上神经信号的产生、传递、调制等基本过程;
(3) 认识实现各种功能的神经回路基础;
(4) 解释脑的高级功能机制等。
脑科学是AI的基础:其任何研究进展都将对人工智能的研究起到积极的推动作用。
2. 认知科学和思维科学
认知:可一般地认为是和情感、动机、意志相对应的理智或认识过程,或者是为了一定的目的,在一定的心理结构中进行的信息加工过程。
美国心理学家浩斯顿(Houston)等人把认知归纳为以下5种主要类型:
(1)认知是信息的处理过程;
(2)认知是心理上的符号运算;
(3)认知是问题求解;
(4)认知是思维;
(5)认知是一组相关的活动,如知觉、记忆、思维、判断、推理、问题求解、学习、想象、概念形成及语言使用等。
认知科学:认知科学(思维科学)是研究人类感知和思维信息处理过程的一门学科,其主要研究目的就是要说明和解释人类在完成认知活动时是如何进行信息加工的
认知科学也是人工智能的重要理论基础,对人工智能发展起着根本性的作用。认知科学涉及的问题非常广泛,除了像浩斯顿提出的相关联活动外,还会受到环境、社会、文化背景等方面的影响。
从认知观点看,AI应同时开展对逻辑思维、形象思维和灵感思维的研究
智能模拟的方法和技术研究
1. 感知、思维
机器感知
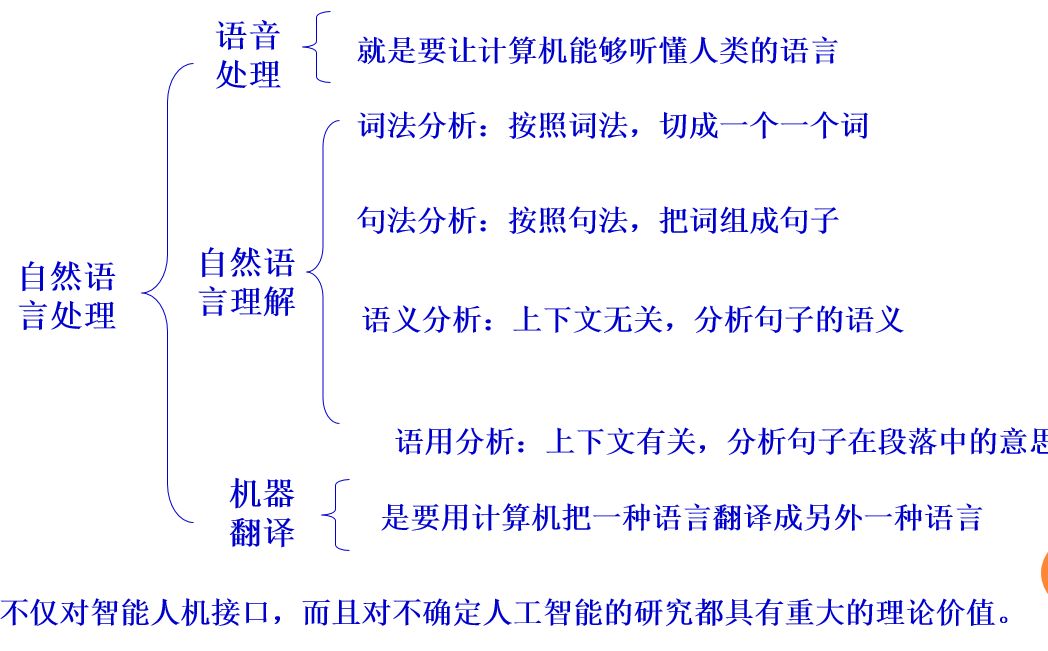
就是要让计算机具有类似于人的感知能力,如视觉、听觉、触觉、嗅觉、味觉
机器视觉(或叫计算机视觉):就是给计算机配上能看的视觉器官,如摄像机等,使它可以识别并理解文字、图像、景物等
机器听觉(或叫计算机听觉):就是给计算配上能听的听觉器官,如话筒等,使计算机能够识别并理解语言、声音等。
机器感知相当于智能系统的输入部分。
机器感知的专门的研究领域:计算机视觉、模式识别、自然语言理解
机器思维
让计算机能够对感知到的外界信息和自己产生的内部信息进行思维性加工
逻辑思维
形象思维
灵感思维
2. 学习、行为、系统
机器学习
让计算机能够像人那样自动地获取新知识,并在实践中不断地完善自我和增强能力。
机器学习方法:机械学习、类比学习、归纳学习、发现学习、遗传学习和连接学习等
机器行为
让计算机能够具有像人那样地行动和表达能力,如走、跑、拿、说、唱、写画等。
相当于智能系统的输出部分。
智能系统与智能机器
无论是人工智能的近期目标还是远期目标,都需要建立智能系统或构造智能机器
需要开展对系统模型、构造技术、构造工具及语言环境等研究
英文扩展
hi and welcome to another KHvideo technology moves at breakneck speeds and we now have more power in our pockets than we had in our homes in the 90s artificial intelligence or AI has been fascinating concept of science fiction for decades but many researchersthink we're finally getting close to making AI a reality here are four ways AImight affect us in the future one automated transportation we're already seeingthe beginnings of self-driving cars though the vehicles are currently required to have a driver present at the wheel for safety despite these exciting developments technology isn't perfect yet and it'll take a while for public acceptance to bring automated cars into widespread use Google began testing aself-driving car in 2012 and since then the US Department of Transportation has released definitions of different levels of automation with Google's car classified as the first level down from full automation one self-drive platform that has really taken off is that one used by Tesla other transportation methods are closer to full automation such as buses and trains number twocyborg technology one of the main limitations of being human is simply our own bodies and brains in the future we'll be able to augment ourselves with computers and enhance many of our own natural abilities though many of these possible cyborg enhancements would be added for convenience others might servea more practical purpose AI will become useful for people with amputated limbsas the brain will be able to communicate with robotic limbs to give the patient more control this kind of cyborg technology would significantly reducelimitations that amputees deal with on a daily basis number three taking overdangerous jobs robots are already taking over some of the most hazardous jobsavailable including bomb defusing yet these robots aren't quite robots yet theyare technically drones being used as a physical counterpart for defusing bombs butrequiring a human to control them rather than using a whatever their classificationthey have saves thousands of lives by taking over some of the most dangerousjobs in the world as technology improves we will likely see more AI integrationto help these machines function other jobs also being reconsidered for robotintegration is welding welding known for producing toxic substances in ten heatand ear-splitting noise can now be outsourced to robots in most cases numberfour solving climate change solving climate change might seem like a tall order from a robot yet machines have more access to data than one person ever could storing a mind-boggling number of statistics using big data AI could one day identifytrends and use that information to come up with solutions to the world'sbiggest problems although we don't know the exact future it is quite evidentthat interacting with AI will soon become an everyday activity thanks for watching make sure to LIKE comment and subscribe and have a great day.
【Part 2】
孕育期
1.孕育(1956年以前)
自远古以来,人类就有用机器代替人们脑力劳动的的幻想:公元前900多年我国有歌舞机器人流传的记载。
亚里斯多德(公元前384——322):古希腊伟大的哲学家和思想家,创立了演绎法。
莱布尼茨(1646——1716):德国数学家和哲学家把形式逻辑符号化,奠定了数理逻辑的基础
图灵(1912——1954):英国数学家,1936年创立了自动机理论,自动机理论亦称图灵机,是一个理论计算机模型。
莫克利(1907——1980):美国数学家、电子数字计算机的先驱,他与埃克特(J.P.Eckert)合作,1946年研制成功了世界上第一台通用电子计算机ENIAC
麦克洛奇和皮兹:美国神经生理学家,于1943年建成了第一个神经网络模型(MP模型)。
维纳1874—1956) :美国著名数学家、控制论创始人。1948年创立了控制论。控制论向人工智能的渗透,形成了行为主义学派。
图灵又于1950年,发表题为《计算机能思维吗?》的著名论文,明确提出了“机器能思维”的观点。
这些,都为人工智能的诞生准备了必要的思想、理论和物质技术条件。
形成期
1. 诞生
AI诞生于一次历史性的聚会
时间:1956年夏季
地点:达特莫斯 (Dartmouth) 大学
目的:为使计算机变得更“聪明” ,或者说使计算机具有智能
发起人:
麦卡锡(J.McCarthy) ,Dartmouth的年轻数学家、计算机专家,后为MIT教授
明斯基(M.L.Minsky),哈佛大学数学家、神经学家,后为MIT教授
洛切斯特(N.Lochester), IBM公司信息中心负责人
香农(C.E.Shannon),贝尔实验室信息部数学研究员
参加人:
莫尔(T.more)、塞缪尔(A.L.Samuel), IBM公司
塞尔夫里奇(O.Selfridge)、索罗蒙夫(R.Solomonff) , MIT
纽厄尔(A.Newell),兰德(RAND)公司
西蒙(H.A.Simon),卡内基(Carnagie)工科大学
会议结果:
由麦卡锡提议正式采用了“Artificial Intelligence”这一术语
2. 早期研究
心理学小组:1957年,纽厄尔、肖(J.Shaw)和西蒙等人的心理学小组研制了称为逻辑理论机(简称LT)的数学定理证明程序。
1960年研制了通用问题求解程序。该程序当时可解决11种类型的问题,如不定积分、三角函数、代数方程、猴子摘香蕉、河内梵塔、人—羊过河等。
IBM工程小组:1956年,塞缪尔在IBM704计算机上研制成功了具有自学习、自组织和自适应能力的西洋跳棋程序。这个程序可以从棋谱中学习,也可以在下棋过程中积累经验、提高棋艺。通过不断学习,该程序1959年击败了塞缪尔本人,1962年又击败了一个州的冠军。
MIT小组:1958年,麦卡西建立了行动规划咨询系统。
1960年,麦卡西又研制了人工智能语言LISP。
1961年,明斯基发表了“走向人工智能的步骤”的论文,推动了人工智能的发展。
其他方面:1965年,鲁宾逊(J.A.Robinson)提出了归结(消解)原理。
1965年,费根鲍姆开始研究化学专家系统DENDRAL。
知识应用期
1. 挫折和教训
失败的预言:
60年代初,西蒙预言:10年内计算机将成为世界冠军、将证明一个未发现的数学定理、将能谱写出具有优秀作曲家水平的乐曲、大多数心理学理论将在计算机上形成。
挫折和教训
在博弈方面,塞缪尔的下棋程序在与世界冠军对弈时,5局败了4局。
在定理证明方面,发现鲁宾逊归结法的能力有限。当用归结原理证明两个连续函数之和还是连续函数时,推了10万步也没证出结果。
在问题求解方面,对于不良结构,会产生组合爆炸问题。
在机器翻译方面,发现并不那么简单,甚至会闹出笑话。例如,把“心有余而力不足”的英语句子翻译成俄语,再翻译回来时竟变成了“酒是好的,肉变质了”
在神经生理学方面,研究发现人脑有1011-12以上的神经元,在现有技术条件下用机器从结构上模拟人脑是根本不可能的。
在其它方面,人工智能也遇到了不少问题。从此,在全世界范围内人工智能研究陷入困境、落入低谷。
2. 以知识为中心的研究
以知识为中心的研究:
专家系统实现了人工智能从理论研究走向实际应用,从一般思维规律探讨走向专门知识运用的重大突破,是AI发展史上的一次重要转折。
1972年,费根鲍姆开始研究MYCIN专家系统,并于1976年研制成功。从应用角度看,它能协助内科医生诊断细菌感染疾病,并提供最佳处方。从技术角度看,他解决了知识表示、不精确推理、搜索策略、人机联系、知识获取及专家系统基本结构等一系列重大技术问题。
1976年,斯坦福大学的杜达(R.D.Duda)等人开始研制地质勘探专家系统PROSPECTOR
这一时期,与专家系统同时发展的重要领域还有计算机视觉和机器人,自然语言理解与机器翻译等。
新的问题:
专家系统本身所存在的应用领域狭窄、缺乏常识性知识、知识获取困难、推理方法单一、没有分布式功能、不能访问现存数据库等问题被逐渐暴露出来。
从学派分立到综合
人工智能研究的三大学派:
随着人工神经网络的再度兴起和布鲁克(R.A.Brooks)的机器虫的出现,人工智能研究形成了符号主义、联结主义和行为主义三大学派。
符号主义学派
是指基于符号运算的人工智能学派,他们认为知识可以用符号来表示,认知可以通过符号运算来实现。例如,专家系统等。
联结主义学派
是指神经网络学派,在神经网络方面,继鲁梅尔哈特研制出BP网络之后,人工神经网络研究掀起了第二次高潮。之后,随着模糊逻辑和进化计算的逐步成熟,又形成了“计算智能”这个统一的学科范畴。
行为主义学派
是指进化主义学派,在行为模拟方面,麻省理工学院的布鲁克教授1991年研制成功了能在未知的动态环境中漫游的有6条腿的机器虫。
三大学派的综合集成
随着研究和应用的深入,人们又逐步认识到,三个学派各有所长,各有所短,应相互结合、取长补短,综合集成。
智能科学技术的兴起
目前,一个以人工智能为核心,以自然智能、人工智能、集成智能为一体的新的智能科学技术学科正在逐步兴起,并引起了人们的极大关注。
智能科学技术学科研究的主要特征
(1) 由对人工智能的单一研究走向以自然智能、人工智能、集成智能为一体的协同研究;
(2) 由人工智能学科的独立研究走向重视与脑科学、认知科学、等学科的交叉研究;
(3) 由多个不同学派的独立研究走向多学派的综合研究;
(4) 由对个体、集中智能的研究走向对群体、分布智能的研究;
(5) 智能技术应用已渗透到人类社会的各个领域。
智能科学技术学科教育正在兴起
作为一个新兴学科,我国第一个智能科学与技术本科专业在北大诞生,目前国内已有该专业17个。
AI研究中的不同学派
1.不同学派
符号主义学派(逻辑主义、心理学派)
主要观点:AI起源于数理逻辑,人类认知的基元是符号,认知过程是符号表示上的一种运算
代表性成果:厄尔和西蒙等人研制的称为逻辑理论机的数学定理证明程序LT
代表人物:纽厄尔、肖、西蒙和尼尔逊(Nilsson)等
联结主义学派(仿生学派或生理学派)
主要观点:AI起源于仿生学,特别是人脑模型,人类认知的基元是神经元,认知过程是神经元的联结活动过程
代表性成果:由麦克洛奇和皮兹创立的脑模型,即MP模型
代表人物:麦克洛奇和皮兹
行为主义学派(进化主义、控制论学派)
主要观点:AI起源于控制论,智能取决于感知和行为,取决于对外界复杂环境的适应,而不是推理。
代表性成果:Brooks教授研制的机器虫
代表人物:Brooks教授
2.不 同学派的理论之争
符号主义
智能的基础是知识,其核心是知识表示和知识推理;知识可用符号表示,也可用符号进行推理,因而可以建立基于知识的人类智能和机器智能的统一的理论体系。
联结主义
思维的基元是神经元,而不是符号;思维过程是神经元的联结活动过程,而不是符号运算过程;反对符号主义关于物理符号系统的假设。
行为主义
智能取决于感知和行动,提出了智能行为的“感知—动作”模型;智能不需要知识、不需要表示、不需要推理;人工智能可以像人类智能那样逐步进化
3. 不同学派的方法之争
符号主义
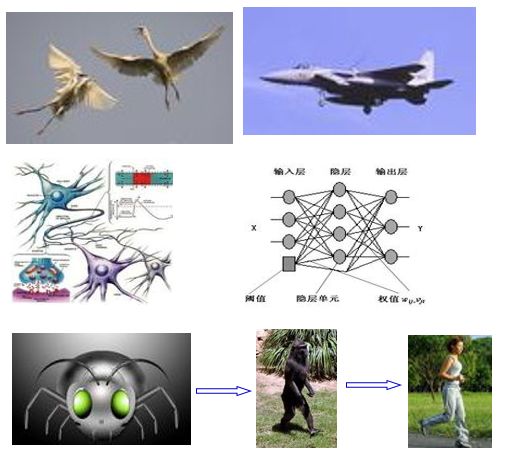
功能模拟
构造能够模拟大脑功能的智能系统。
相当于“鸟飞”
联结主义
结构模拟
构造模拟大脑结构的神经网络系统。
相当于“飞鸟”
行为主义
行为模拟
构造具有进化能力的智能系统。
相当于“由猿到人”
AI的研究应用领域
机器思维
1.推理
推理的概念:推理是指按照某种策略从已知事实出发利用知识推出所需结论的过程。
推理的类型:可根据所用知识的确定性,将其分为:
确定性推理,指推理所使用的知识和推出的结论都是可以精确表示的,其真值要么为真、要么为假。
不确定性推理,指推理所使用的知识和推出的结论可以是不确定的。所谓不确定性是对非精确性、模糊型和非完备性的统称。
推理的理论基础:逻辑是一门研究人们思维规律的学科,数理逻辑则是用数学的方法去研究逻辑问题。
确定性推理主要是基于一阶经典逻辑。它能解决的问题很有限。
不确定性推理主要基于非经典逻辑和概率等。非一阶经典逻辑是泛指除一阶经典逻辑以外的其他各种逻辑,如多值逻辑、模糊逻辑、模态逻辑、概率逻辑、默认逻辑、次协调逻辑及泛逻辑等。
最常用的不确定性推理方法:基于可信度的确定性理论,基于Bayes公式的主观Bayes方法,基于贝叶斯网络的概率推理和基于模糊逻辑的可能性理论等。
2. 搜索
搜索的概念:是指为了达到某一目标,不断寻找推理线路,以引导和控制推理,使问题得以解决的过程。
搜索的类型:可根据问题的表示方式将其分为两大类型
状态空间搜索是一种用状态空间法求解问题时的搜索方法;
与/或树搜索是一种用问题规约法求解问题时的搜索方法。
搜索的主要问题:人工智能最关心的是如何利用搜索过程所得到的对尽快达到目标有用的信息来引导搜索过程,即启发式搜索方法。
状态空间的启发式搜索方法
与/或树的启发式搜索方法
博弈树搜索:博弈是一个典型的搜索问题。到目前为止,人们对博弈的研究还主要是以下棋为对象,其典型代表是IBM公司研制的IBM超级计算机“深蓝”和“小深”与国际象棋世界冠军对垒。在国内,有关学者也正在积极研究中国象棋的机器博弈。例如,2006年8月在北京举行的首届中国象棋人机大赛中,计算机棋手以3胜5平2负的微弱优势战胜了国内的人类象棋大师。
研究博弈的目的:不完全是为了让计算机与人下棋,而主要是为了给人工智能研究提供一个试验场地,同时也为了证明计算机具备有智能。
3. 规划
规划的概念
是指从某个特定问题状态出发,寻找并建立一个操作序列,直到求得目标状态为止的一个行动过程的描述。
规划的特点
与一般问题求解技术相比,规划更侧重于问题求解过程,并且要解决的问题一般是真实世界的实际问题,而不是抽象的数学模型。例如,第2章的机器人移盒子、猴子摘香蕉等问题。
规划系统的例子
斯坦福研究所问题求解系统(Stanford Research Institute ProblemSolver, STRIPS ),是一种基于状态空间和F规则的规划系统。
它由3部分所组成:
(1) 世界模型:用一阶谓词公式表示,它包括问题的初始状态和目标状态。
(2) 操作符(即F规则):它包括先决条件、删除表和添加表。
(3) 操作方法:它采用状态空间表示和中间----结局分析的方法。
状态空间包括初始状态、中间状态和目标状态;
中间----结局分析的每一步都选择能够缩小当前状态与目标状态之间的差距的先决条件可以满足的F规则执行,直至到达目标为止。
机器感知
1.计算机视觉(1/2)
概念
用计算机来实现或模拟人类的视觉功能,其主要研究目标是使计算机具有通过二维图像认知三维环境信息的能力。
重要性
在人类感知到的外界信息中,有80%以上是通过视觉得到的。
视觉系统
人类视觉系统的功能是通过眼睛与大脑共同实现的。人们视野中的物体在可见光的照射下,先在眼睛的视网膜上形成图像,然后由感光细胞转换成神经脉冲信号,再经神经纤维传入大脑皮层,最后由大脑皮层对其进行处理与理解。
计算机视觉
不仅仅指对光信号的感受,它包括了对视觉信息的获取、传输、处理、存储与理解的全过程。
1. 计算机视觉(2/2)
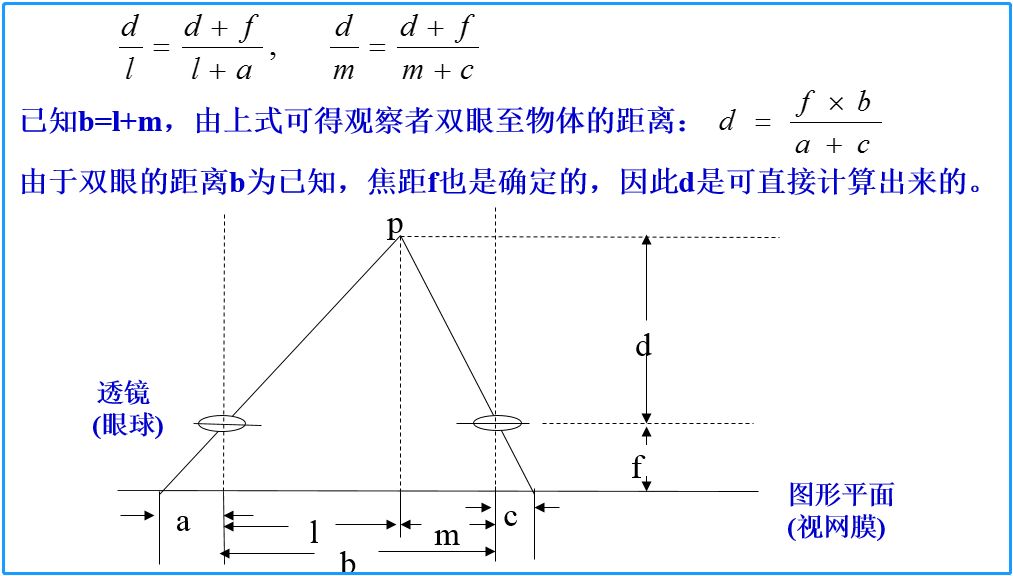
设p为一物体。两个透镜的轴线是平行的。f为两透镜与图像平面的距离,即为焦距。b为两透镜轴线在基线上的距离,即为两眼的距离。l和m分别是p点与左、右透镜轴线的距离。a和c分别是图像平面上的左、右图像与其相应透镜轴线上的距离。
从两个相似三角形,可得到下式:
2. 模式识别
模式识别的概念
是指让计算机能够对给定的事务进行鉴别,并把它归入与其相同或相似的模式中。
被鉴别的事物可以是物理的、化学的、生理的,也可以是文字、图像、声音等。
模式识别的一般过程
(1)采集待识别事物的模式信息;
(2)对其进行各种变换和预处理,从中抽出有意义的特征或基元,得到待识别事物的模式;
(3)与机器中原有的各种标准模式进行比较,完成对待识别事物的分类识别;
(4)输出识别结果。
3. 自然语言理处理
自然语言处理就是要研究人类与计算机之间进行有效交流的各种理论和方法。
机器行为
1. 智能控制(1/2)
智能控制的概念
是指那种无需或需要尽可能少的人工干预就能独立的驱动智能机器实现其目标的控制过程。它是人工智能技术与传统自动控制技术相结合的产物。
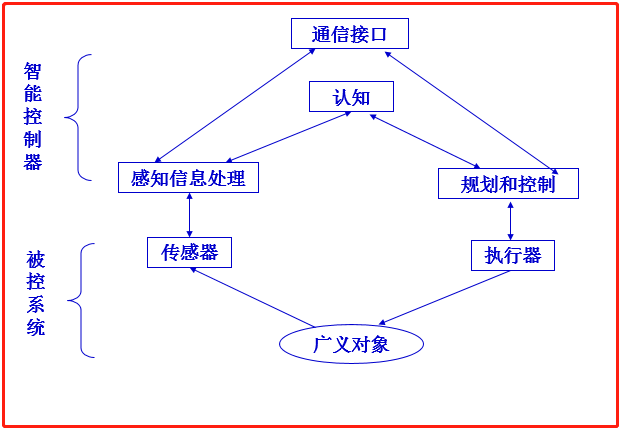
智能控制系统
是指那种能够实现某种控制任务,具有自学习、自适应和自组织功能的智能系统。从结构上,它由传感器、感知信息处理模块、认知模块、规划和控制模块、执行器和通信接口模块等主要部件所组成。
常用的智能控制方法
模糊控制,神经网络控制,专家控制,学习控制等。
主要应用领域
智能机器人系统、计算机集成制造系统(CIMS)、复杂工业过程的控制系统、航空航天控制系统、社会经济管理系统、交通运输系统、环保及能源系统等。
2.智能控制系统的结构(2/2)
3. 智能制造
智能制造的概念
是指以计算机为核心而集成有关技术,以取代、延伸与强化有关专门人才在制造中的有关部分脑力活动所形成、发展、乃至创新了的制造。
需要的人工智能技术
传统人工智能技术:机器学习、数据挖掘、知识发现,基于Web的工艺规划、监控、诊断维护等方面的集成。
软计算技术:扎德提出的“硬计算”和“软计算”的概念。硬计算是指传统的计算和逻辑演算;软计算与人脑相对应,具有在不确定、不精确环境中进行推理和学习的卓越能力。
计算智能:神经计算、进化计算和模糊计算统称为计算智能。
智能Agent技术:Agent是一种能够在一定环境中自主运行和自主交互,以满足其设计目标的计算实体。主要是多Agent系统和移动Agent技术。
机器学习
机器学习就是让计算机能够像人那样自动地获取新知识,并在实践中不断地完善自我和增强能力。
机器学习是机器获取知识的根本途径,同时也是机器具有智能的重要标志。
机器学习有多种不同的分类方法,如果按照对人类学习的模拟方式,机器学习可分为符号学习和神经学习等
1. 符号学习
符号学习的概念
是指从功能上模拟人类学习能力的机器学习方法,它是一种基于符号主义学派的机器学习观点。
符号学习的类型
可根据学习策略,即学习中所使用的推理方法,将其分为记忆学习、归纳学习、演绎学习等。
记忆学习也叫死记硬背学习,它是一种最基本的学习方法,原因是任何学习系统都必须记住它们所获取的知识,以便将来使用。
归纳学习是指以归纳推理为基础的学习,它是机器学习中研究得较多的一种学习类型,其任务是要从关于某个概念的一系列已知的正例和反例中归纳出一个一般的概念描述。例如,示例学习和决策树学习。
演绎学习是指以演绎推理为基础的学习,解释学习是一种演绎学习方法,它是在领域知识的指导下,通过对单个问题求解例子的分析,构造出求解过程的因果解释结构,并对该解释结构进行概括化处理,得到一个可又来求解类似问题的一般性知识。
2. 神经学习
神经学习的概念
神经学习也称为连接学习,它是一种基于人工神经网络的学习方法。现有研究表明,人脑的学习和记忆过程都是通过神经系统来完成的。在神经系统中,神经元既是学习的基本单位,同时也是记忆的基本单位。
神经学习的类型
感知器学习实际上是一种基于纠错学习规则,采用迭代的思想对连接权值和阈值进行不断调整,直到满足结束条件为止的学习算法。
BP网络学习是一种误差反向传播网络学习算法。这种学习算法的学习过程由输出模式的正向传播过程和误差的反向传播过程所组成。其中,误差的反向传播过程用于修改各层神经元的连接权值,以逐步减少误差信号,直至得到所期望的输出模式为止。
Hopfield网络学习实际上是要寻求系统的稳定状态,即从网络的初始状态开始,逐渐向其稳定状态过渡,直至达到稳定状态为止。至于网络的稳定性,则是通过一个能量函数来描述的。
计算智能
计算智能(Computational Intelligence,CI)是借鉴仿生学的思想,基于人们对生物体智能机理的认识,采用数值计算的方法去模拟和实现人类的智能。
计算智能的三大基本领域包括神经计算、进化计算、模糊计算。
1. 神经计算
神经计算的概念:亦称神经网络(Neural Network,NN),它是通过对大量人工神经元的广泛并行互联所形成的一种人工网络系统,用于模拟生物神经系统的结构和功能。
主要研究内容:包括人工神经元的结构和模型,人工神经网络的互连结构和系统模型,基于神经网络的联结学习机制等
人工神经元:是指用人工方法构造单个神经元,它有抑制和兴奋两种工作状态,可以接受外界刺激,也可以向外界输出自身的状态,用于模拟生物神经元的结构和功能,是人工神经网络的基本处理单元。
人工神经网络的互连结构(或称拓扑结构)是指单个神经元之间的连接模式,它是构造神经网络的基础。从互连结构的角度,神经网络可分为前馈网络和反馈网络两种主要类型。
网络模型是对网络结构、连接权值和学习能力的总括。最常用的有传统的感知器模型,具有误差前向传播功能的前向传播网络模型,采用反馈连接方式的反馈网络模型等。
神经网络具有自学习、自组织、自适应、联想、模糊推理等能力,在模仿生物神经计算方面有一定优势。目前,神经计算的研究和应用已渗透到许多领域,如机器学习、专家系统、智能控制、模式识别等。
2. 进化计算
进化计算的概念
是一种模拟自然界生物进化过程与机制,进行问题求解的自组织、自适应的随机搜索技术。它以达尔文进化论的“物竟天择、适者生存”作为算法的进化规则,并结合孟德尔的遗传变异理论,将生物进化过程中的繁殖、变异、竞争和选择引入到了算法中,是一种对人类智能的演化模拟方法。
进化计算的主要分支
遗传算法、进化策略、进化规划和遗传规划四大分支。其中,遗传算法是进化计算中最初形成的一种具有普遍影响的模拟进化优化算法。
遗传算法的基本思想
(美国密执安大学霍兰德教授1962提出)是使用模拟生物和人类进化的方法来求解复杂问题。它从初始种群出发,采用优胜略汰、适者生存的自然法则选择个体,并通过杂交、变异产生新一代种群,如此逐代进化,直到满足目标为止。
模糊计算
模糊计算:亦称模糊系统,是通过对人类处理模糊现象的认知能力的认识,用模糊集合和模糊逻辑去模拟人类的智能行为的。模糊集合与模糊逻辑是美国加州大学扎德(Zadeh)教授1965年提出来的一种处理因模糊而引起的不确定性的有效方法。
模糊概念的定义:通常,人们把那种因没有严格边界划分而无法精确刻画的现象称为模糊现象,并把反映模糊现象的各种概念称为模糊概念。例如,“大”、“小”、“多”、“少”等。
模糊概念的表示:通常是用模糊集合来表示的,而模糊集合又是用隶属函数来刻画的。一个隶属函数描述一个模糊概念,其函数值为[0, 1]区间的实数,用来描述函数自变量所代表的模糊事件隶属于该模糊概念的程度。
模糊计算的争论:一方面模糊逻辑存在一定缺陷;另一方面它在推理、控制、决策等方面得到了非常广泛的应用。
人工生命
人工生命(Artificial Life)是美国洛斯.阿拉莫斯(Los Alamos)非线性研究中心克里斯.兰顿(Chris Langton),在研究“混沌边沿”的细胞自动机中于1987年提出的一个概念。
他认为:人工生命就是要研究能够展示人类生命特征的人工系统。即研究以非碳水化合物为基础的、具有人类生命特征的人造生命系统。
人工生命的研究目标就是要创造出具有人类生命特征的人工生命。
人工生命研究并不关心十分关心已经知道的以碳水化合物为基础的生命的特殊形式,即“生命之所知”,它主要是生物学研究的主题
人工生命最关心的是生命的存在形式,即“生命之所能”。生命之所能,是人工生命研究所关心的主要问题。
按照这种观点,如果能从具体的生命中抽象出控制生命的“存在形式”,并且这种存在形式可以在另外一种物质中实现,那么就可以创造出基于不同物质的另外一种生命----人工生命。
人工生命的主要研究内容主要包括计算机进程、细胞自动机、人工脑和进化机器人等。其中,进化机器人不同于传统意义上的机器人,它是一种利用计算机和非有机物质构造出来的具有人类生命特征的人工生命实体。
分布智能
分布智能的概念
分布智能主要研究在逻辑上或物理上分布的智能系统之间如何相互协调各自的智能行为,实现问题的并行求解。
分布智能的两个主要方向
分布式问题求解主要研究如何在多个合作者之间进行任务划分和问题求解,它一般是针对某一问题去创建一个能够进行合作求解的协作群体;
多Agent系统主要研究如何在一群自主的Agent之间进行智能行为的协调,它不限于单一目标,可创建一个能够共同处理单个目标或多个目标的智能群体。
多Agent系统的组成与工作:它由多个自主Agent所组成,其中的每个Agent都可以自主运行和自主交互,即当一个Agent 需要与别的Agent合作时,就通过相应的通信机制去寻找可以合作并愿意合作的Agent,以共同解决问题。
智能系统
智能系统可以泛指各种具有智能特征和功能的软硬件系统。从这种意义上讲,前面所讨论的不少研究内容都应以智能系统的形式来出现,例如智能控制系统、智能制造系统、智能检索系统等。这里主要介绍除前述研究内容以外的专家系统和智能决策支持系统。
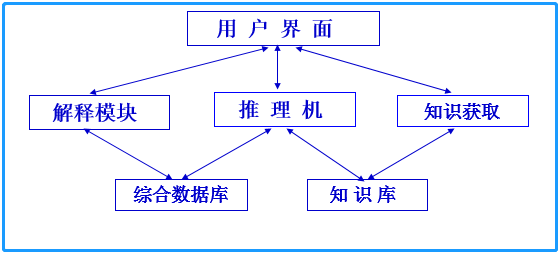
1. 专家系统
专家系统是一种基于知识的智能系统,它将领域专家的经验用知识表示方法表示出来,并放入知识库中,供推理机使用。
随着计算网络、多Agent、计算智能等技术的发展,出现了模糊专家系统、神经网络专家系统、基于Web的专家系统、协同式专家系统和分布式专家系统等。
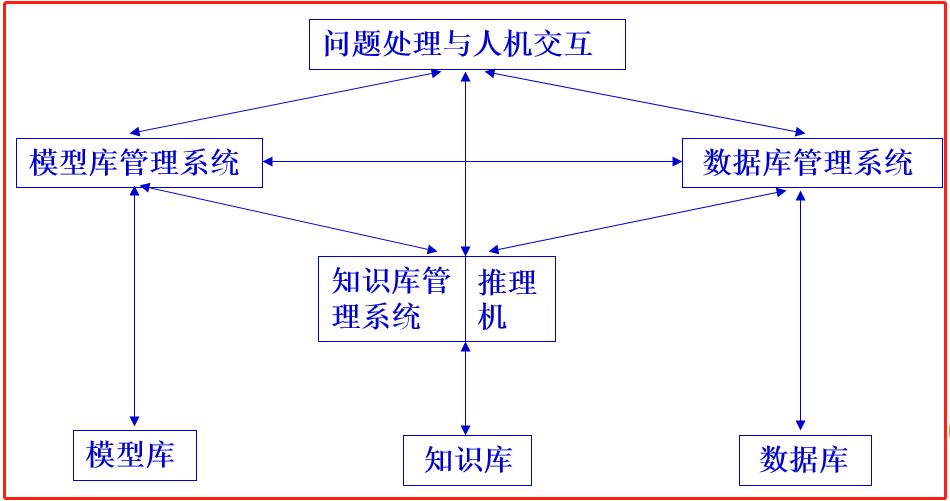
智能决策支持系统
智能决策支持系统是指那种在传统决策支持系统中增加了相应的智能部件的决策支持系统。
智能决策支持系统是把人工智能技术,尤其是专家系统技术与决策支持系统相结合的产物,具有很宽的应用范围和很好的应用前景。
智能、情感和心理
智能(intelligence)
指人类在认识客观世界中,由思维过程和脑力活动所表现出的综合能力。如:感知、记忆、思维、学习、自适应、行为等。
情感(affect)
指人对客观现实的态度的体验。包括:
情绪(emotion):侧重于生理现象:喜、怒、哀、乐…
情感(feeling):侧重于价值判断:爱、恨…
情操(sentiment):高级的情感现象:道德、理智、审美…
心理(mind)
指神经系统在环境刺激下所产生的精神现象。它是心理现象和心理活动的简称。从心理现象的动态过程,它包括:
认知(cognition) :指认识事物、获取知识和应用知识的过程。是人类最基本的心理过程,如感觉、知觉、记忆、想象、思维、语言、问题解决和创造等。
情感(affect):…
意志(will):指自觉地确定目的,组织和调节行为,克服困难,去实现预定目的的过程。
人工智能、人工情感和人工心理
人工智能(Artificial Intelligence)
是用人工的方法在机器上实现的智能。
人工情感(Artificial Emotion)
是利用信息科学的手段对人类情感过程进行模拟、识别和理解,使机器能够产生类人情感并与人类进行自然和谐地人机交互的研究领域。
人工心理(Artificial Psychology)
是利用信息科学的手段, 对人的心理活动(着重是人的情感、意志、性格、创造)的更全面再一次人工机器(计算机、模型算法等)模拟,其目的在于从心理学广义层次上研究人工情感、情感与认知、动机与情感的人工机器实现问题。
1. 智能机器人
机器人(Robots)和机器人学
机器人(Robots)是一种可再编程的多功能操作装置。机器人学是在电子学、人工智能、控制论、系统工程、精密机械、信息传感、仿生学、以及心理学等多种学科或技术发展的基础上形成的一种综合性技术学科。
机器人研究的意义
机器人既是人工智能的研究对象,同时又是人工智能的试验场地,人工智能的所有技术几乎都可以在这个领域得到应用。
机器人的发展过程
经历了遥控、程序、自适应、智能机器人、情感机器人。 人工智能的主要研究对象是智能机器人和情感机器人。
智能机器人具有的能力
感知能力、思维能力和行为能力的机器人。这种机器人能够主动的适应外界环境变化,并能够通过学习丰富自己的知识、提高自己的工作能力。
情感机器人
是一种具有情感(爱、恨…)和情绪(喜、怒、哀、乐…)功能新一代机器人。
世界上最先进的机器人:
大狗(BigDog)机器人是美国国防部高级研究项目。其目标是凡是人或动物能去的地方该机器人都能去。
应用目的:完成在特殊恶劣环境中的特定运输任务。
功能:在未知的特殊恶劣环境(丛林、雪地、冰面、河床等)中行走
能识别并避开或越过障碍(树木、乱石堆等),在遇到外界环境的突发性冲击时,能 迅速调整自身的姿态,保持站立并继续前进。大狗机器人.flv
大鸟 (SmartBird)机器人:德国科技公司费斯托(FESTO)研制, 它可以自主地启动、飞翔和降落,灵活程度可以和真正的鸟相媲美。

2.智能网络
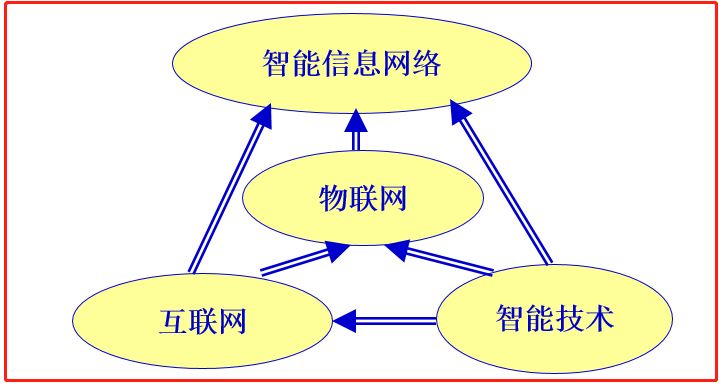
智能信息网络的概念
智能信息网络是一种覆盖整个信息化社会,能够支持“信息获取、传递、处理、认知、决策、控制”的全过程的一种智能网络。
现有互联网的弊端
(1) 现有互联网是一个杂乱无章、真假不分的信息海洋,它不区分问题领域,不考虑用户类型,不关心个人兴趣,不过滤信息内容。
(2) 传统的搜索引擎存在着大量的信息冗余,给人们带来了不少烦恼。
智能信息网络的基本构架
它以互联网、物联网基础,利用智能技术进行智能信息处理。
物联网:是一种基于射频技术等,在互联网基础上,实现全球物品信息实时共享的实物互联网。它实现了物与物、人与物之间的自动化信息交换。
3. 智能游戏
智能游戏
游戏是一种娱乐活动。游戏技术和计算机技术的结合,产生了“计算机游戏”或“视频游戏”,和网络技术的结合产生了“网络游戏”,和人工智能技术的结合产生了“智能游戏”
即游戏中的非玩家角色具有一定智能行为的游戏。
智能游戏中的智能技术
感知技术:实现对玩家角色的感知
行为:游戏状态的更新。
推理和决策:对游戏当前信息的认知和决策。
记忆:用于记忆感知到的游戏状态。
搜索:尝试和发现合适的游戏动作。
学习:非玩家角色在游戏过程中学到一定的知识。
智能游戏的学术意义
智能游戏是智能科学技术的一个研究对象;
智能游戏又是智能科学技术研究(思维、决策等)的一个很好的试验平台
人工智能的现状与思考
1. 多学科交叉研究
人工智能理论基础研究
应强调与脑科学、认知科学、心理学、信息科学、生物学、逻辑学、物理学和数学等学科的交叉研究。
脑科学
为人工智能研究提供人脑神经系统功能的本质和机理;
认知科学
为人工智能研究提供感知、思维、学习和语言等基本原理;
心理学
为人工智能研究提供认知、情感、意识等心理过程及联系;
生物学
为人工智能研究提供自然界生物运行的机制;
逻辑学
为人工智能研究提供思维规律描述的理论和方法;
信息科学
为人工智能研究提供模拟的物质基础和技术手段;
数学
为人工智能研究提供各种有效的计算模型和方法。
2. 多学派和多技术融合研究
多学派融合是一种必然趋势
符号主义:高层、宏观
联结主义:底层、微观
行为主义:感知反应、进化
三大学派各有所长、各有所短,它们各自经过一段时间的分立研究之后,正逐步开始走向融合。多学派融合是人工智能发展的一种必然趋势。
多学派融合需要解决的关键问题
(1)不同学派之间的共同机制是什么?
(2)怎样建立一个统一的智能理论体系?
(3)如何真正实现它们之间的有机融合?
等。
多技术融合是一种必须
现有智能技术只有与现有主流信息技术、信息平台融合,才能有更广阔的发展和应用前景。
3.分布智能研究
分布智能:
主要研究在逻辑上或物理上分布的智能系统之间如何相互协调各自的智能行为,实现问题的并行求解。
多Agent系统:
主要研究如何在一群自主的Agent之间进行智能行为的协调,去创建一个能够共同处理单个目标或多个目标的分布的智能群体。
多Agent系统的工作方式:
它由多个自主Agent组成,其中每个Agent都可以自主运行和自主交互,即当一个Agent需要与别的Agent合作时,就通过相应的通信机制去寻找可以合作并愿意合作的Agent,以共同解决问题。
4.群体智能研究
群体智能
是指无智能的或具有简单智能的个体通过群体协作和组织所表现出来的智能。主要研究单个个体,如何通过群内个体的连接、信息交流、沟通、组织和自组织去产生群体的智能。
粒群计算:起源于对鸟群捕食运动模式的模拟。如果一只鸟(粒子)在某一处找到了一块食物,那么鸟群(粒群)就从这只鸟周围开始向外搜索。

蚁群算法:起源于对蚁群寻找食物行为的模拟。一些蚂蚁在外寻找食物,每只蚂蚁找到了食物都会返回巢中通知同伴,并在路径上留下“气味”,越近的路径气味会越浓,所有蚂蚁都会沿这条最近的路径去捕获该食物。
5.社会智能研究
社会智能
面向复杂社会系统 ,用智能化的计算手段研究社会相关问题,建立适应新型社会问题特点的智能计算理论和具有复杂网络特性的社会组织问题模型。
它不是侧重于模拟个体的高级认知能力,而是把人类智能的本质看作是一种社会性的智能,其智能行为更多的是在由群体构成的社会环境下完成各种社会活动时体现出来的。
应用领域
面向复杂社会系统、适应新型社会问题特点的智能计算理论。
社会科学基础理论模型到计算技术的映射机制。
建立具有复杂网络特性的社会组织形成模型。

6. 集成智能研究
智能的物质、能量、信息基础:自然智能是基于“碳”的信息处理,人工智能是基于“硅”的信息处理,它们的运算能量均为电信号。建立一种基于电信号的统一的信息处理模型?
人类的智能:物质(碳)+能量(生物电)→ (生物)信息
人造的智能:物质(硅)+能量(物理电)→(电子)信息
集成智能的研究:脑-机接口(BCI)的研究进一步证实了集成智能的可能性。
7. 认知计算与情感计算研究
认知计算(cognitive computing)
就是要赋予计算机类似于人的认识事物、获取知识和应用知识的能力。如感觉、知觉、注意、记忆、行为、语言、推理、抉择、思考、想象、创造、问题求解等。
情感计算(affective computing)
就是要赋予计算机类似于人一样的观察、理解和生成各种情感特征的能力
认知和情感的关系
认知和情感虽属于不同的心理过程,但二者又不可分离。认知加工过程不可避免地会受到情感的影响,同时,情感的发生和变化也必然会受到认知的调节。因此,必须将二者联系起来进行研究。
美国麻省理工(MIT)大学明斯基1985年指出,问题不在于智能机器能否有任何情感,而在于机器实现智能时怎么能够没有情感。
认知计算与情感计算的交互研究主要包括:
认知的生成机制和认知计算
情感的生成机制和情感计算
情感影响下的认知计算
认知调节下的情感计算
8. 智能系统与智能服务
智能服务
利用智能技术建造智能系统,推进社会智能化进程。也是人工智能研究和发展的一个重要方面。主要包括:基于智能网络的智能服务,基于智能机器人的智能服务,基于智能软件的智能服务,基于智能产品的智能服务等。
典型的智能服务
智能网络:未来的互联网应该是一种能够支持“信息获取、传递、处理、认知、决策、控制” 全过程的智能信息网络。
未来智能机器人:是一种具有人类感知和行为能力,超强记忆、学习、推理、规划能力,有情感,人性化,能代替人类在真实环境中自主工作的机器人。它将对社会生产力发展和人类社会进步,以及对人们生活、工作和思维方式的改进等产生不可估量的影响。
智能产业和智件:有人预言,随着智能技术与主流信息技术的进一步融合,智能产业将逐步成为社会的第四产业,智件将逐步从软件中分离出来,成为智能计算机系统的三件(硬件、软件、智件)之一。