宝,我看尽了池化。什么化?为你画地为牢的画
极市导读
池化Pooling是卷积神经网络中常见的一种操作,Pooling层是模仿人的视觉系统对数据进行降维,其本质是降维。本文总结了9大池化操作,助力各位的炼丹之路~ >>加入极市CV技术交流群,走在计算机视觉的最前沿
简介
池化Pooling是卷积神经网络中常见的一种操作,Pooling层是模仿人的视觉系统对数据进行降维,其本质是降维。在卷积层之后,通过池化来降低卷积层输出的特征维度,减少网络参数和计算成本的同时,降低过拟合现象。
池化Pooling
01 最大/平均池化Max/Average Pooling
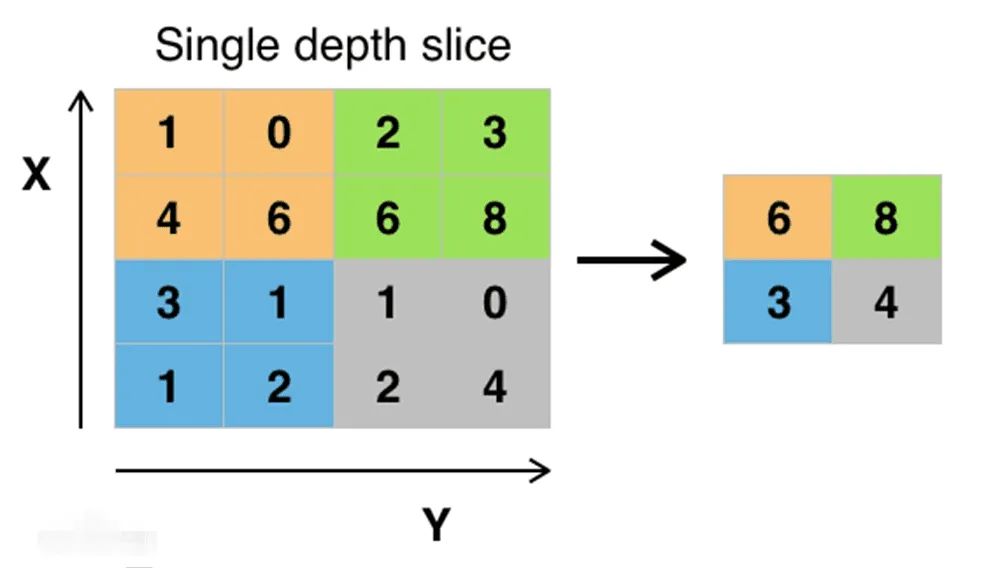
最大池化(Max Pooling)是将输入的图像划分为若干个矩形区域,对每个子区域输出最大值。即,取局部接受域中值最大的点。同理,平均池化(Average Pooling)为取局部接受域中值的平均值。
02 全局池化Global Pooling
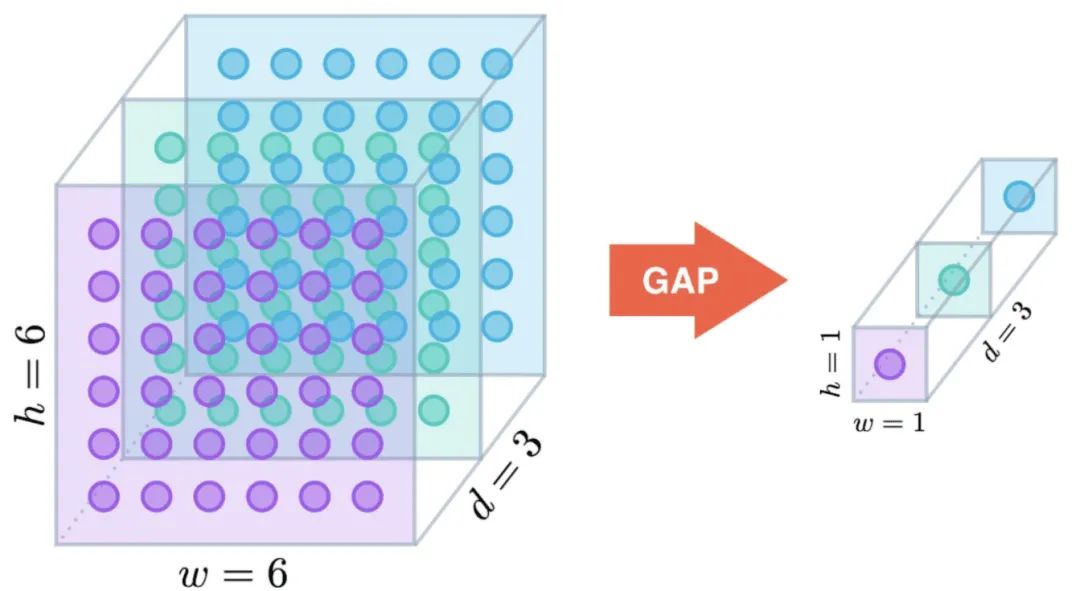
Global Pooling就是Pooling的滑窗size和整个Feature Map的size一样大。在滑窗内的具体pooling方法可以是任意的,所以就会被细分为Global Average Pooling,Global Max Pooling等。
03 随机池化Stochastic pooling
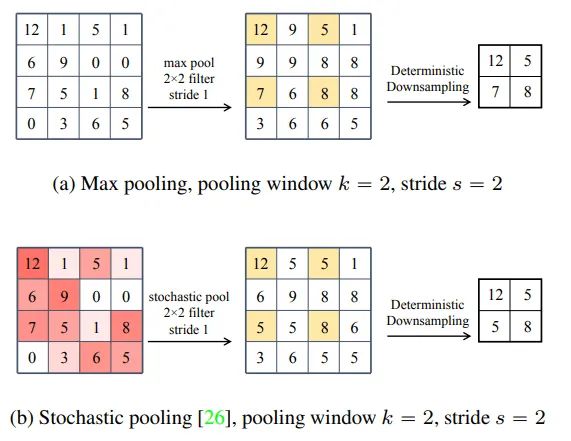
Stochastic pooling是论文《Stochastic Pooling for Regularization of Deep Convolutional Neural Networks》中提到的一种池化策略,大意是只需对特征区域元素按照其概率值大小随机选择,元素值大的被选中的概率也大。
04 Mix Pooling
Mix Pooling是同时利用最大值池化Max Pooling与均值池化Average Pooling两种的优势而引申的一种池化策略。常见的两种组合策略:拼接Cat与叠加Add。
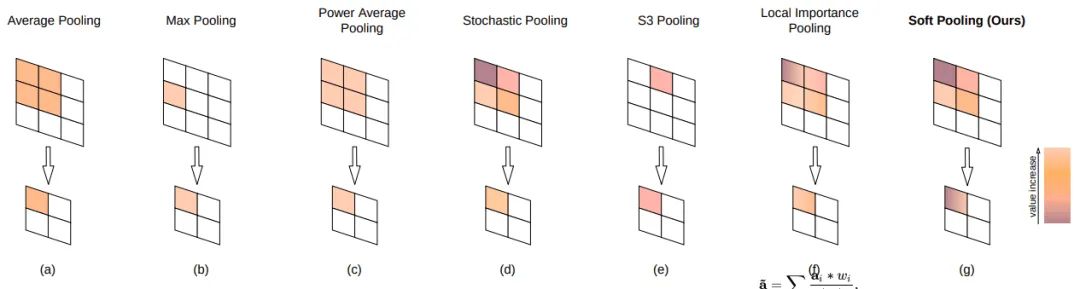
05 Soft Pool
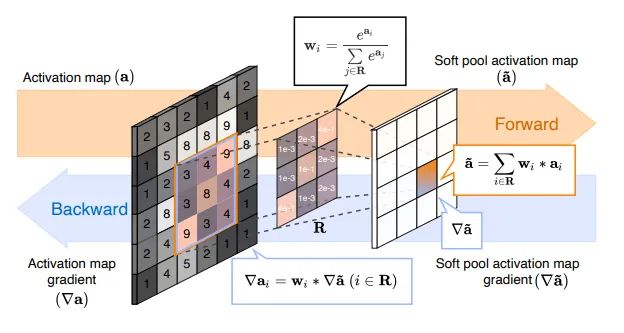
SoftPool是一种变种的Pooling,它可以在保持池化层功能的同时尽可能减少池化过程中带来的信息损失。上图展示了SoftPool操作的Forward阶段与Backward阶段,6*6大小的区域表示的是激活映射a。
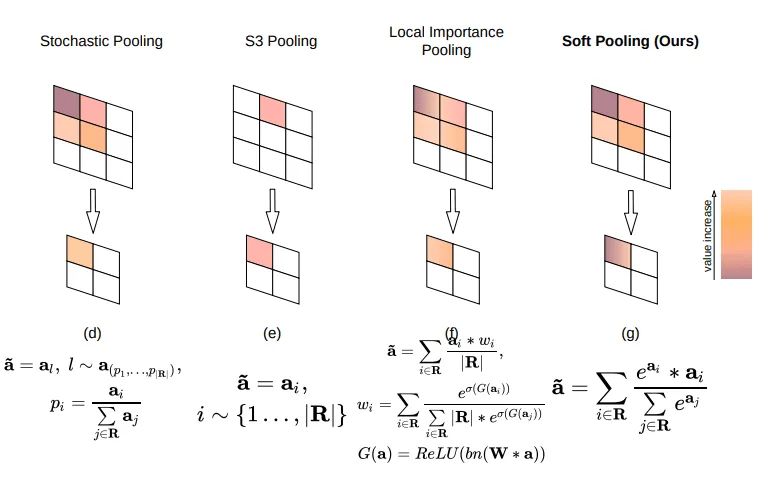
06 Local Importance-based Pooling
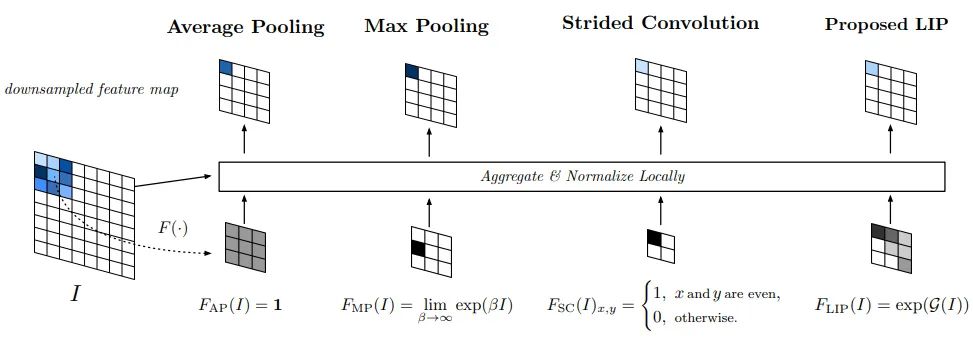
Local Importance-based Pooling提出通过一个基于输入特征的子网络自动学习重要性。它能够自适应地确定哪些特征更重要,同时在采样过程中自动增强识别特征。具体思路是,在原feature map上学习一个类似于attention的map,然后和原图进行加权求平均。需要说明的是,这里采样的间隔其实还是固定的,不符合上述描述的第一条,但是作者认为,由于importance是可变,从而实现变形的感受野。
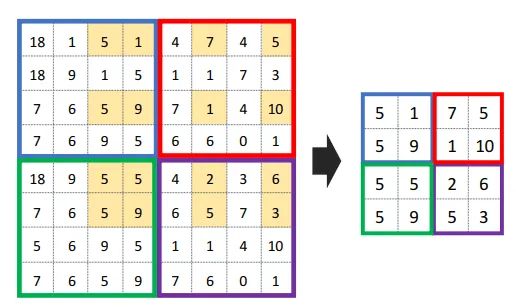
07 S3Pool
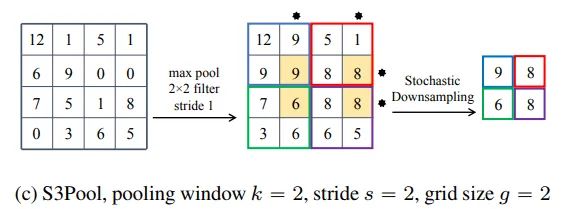
S3Pool提出一种随机位置池化策略,集成了随机池化Stochastic Pooling与最大值池化Max Pooling。
08 图池化
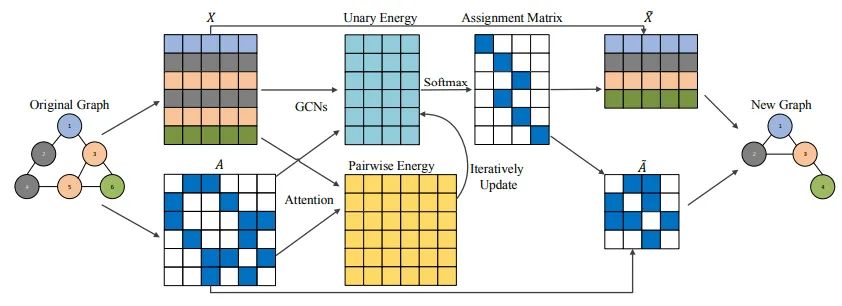
图池化是基于条件随机场的,它是将图池化视为一个节点聚类问题,并使用CRF在不同节点的分配之间建立关系。并通过结合图拓扑信息来推广这个方法,使得图池化可以控制CRF中的成对团集。
09 ROI Pooling
Region of Interest Pooling是在目标检测任务中广泛使用的操作。它对于来自输入列表的每个感兴趣区域,它采用与其对应的输入特征图的一部分并将其缩放到某个预定义的大小。这可以显着加快训练和测试时间,它允许重新使用卷积网络中的特征映射,同时也允许以端到端的方式训练物体检测系统。
参考资料
https://arxiv.org/pdf/1611.05138.pdf
https://arxiv.org/pdf/1301.3557.pdf
https://arxiv.org/pdf/2101.00440.pdf
https://arxiv.org/pdf/1908.04156.pdf
https://openreview.net/pdf?id=BJxg_hVtwH
https://deepsense.ai/region-of-interest-pooling-explained/
https://arxiv.org/abs/2009.07485
如果觉得有用,就请分享到朋友圈吧!
公众号后台回复“目标检测竞赛”获取目标检测竞赛经验资源~

# CV技术社群邀请函 #
备注:姓名-学校/公司-研究方向-城市(如:小极-北大-目标检测-深圳)
即可申请加入极市目标检测/图像分割/工业检测/人脸/医学影像/3D/SLAM/自动驾驶/超分辨率/姿态估计/ReID/GAN/图像增强/OCR/视频理解等技术交流群
每月大咖直播分享、真实项目需求对接、求职内推、算法竞赛、干货资讯汇总、与 10000+来自港科大、北大、清华、中科院、CMU、腾讯、百度等名校名企视觉开发者互动交流~