
从零手写VIO-实现更可靠的定位方案
自主导航是移动机器人的核心功能,而这一功能是建立在移动机器人定位技术之上。目前很多移动机器人都具备了IMU,GPS、相机等多种模态的传感器,虽然单传感器定位能初步实现定位,但是单传感器定位在不同的应用场景中存在很多问题。
如:在穿越隧道或者信号不好的区域,IMU容易发生退化无法工作;在快速运动时,相机功能无法连续获得清晰的图像;当图像发生变化时,相机无法得知是自身产生了运动还是周围场景发生了变化。基于这些问题延伸出了融合IMU和视觉信息的VIO定位方案。
而融合 IMU 和视觉信息的 VIO 算法,不仅能够弥补视觉SLAM算法框架本身无法克服的缺陷:例如尺度问题、累计误差等缺陷,同时很大程度上提高了单目SLAM算法的性能,是一种低成本、高性能的导航方案。
视觉与IMU融合优势具体表现在:
· 可以借助IMU较高的采样频率,进而提高系统的输出频率。
· 提高视觉的鲁棒性,如视觉SLAM因为某些运动或场景出现的错误结果。
· 可以有效的消除IMU的积分漂移。
· 能够校正IMU的Bias。
· 单目与IMU的融合可以有效解决单目尺度不可观测的问题。
· 可以应对快速的运动变化,相机在快速运动过程中会出现运动模糊。
因此在机器人、AR/VR、无人机等领域得到了广泛应用。VIO也成为从事机器人、AR/VR、无人机等领域伙伴的必修课。
但在学习VIO的过程中,伙伴们总会遇到各种各样的阻碍:
1. VIO公式繁多复杂,难以理解不容易掌握;
2. VIO是一个庞大的任务系统,涵盖了SLAM的各个部分,需要系统地学习了解各部分之间的关系;
3. 现在公开的资料虽然多,但是由于没有系统的教程,自学入门难,学习效率低,要走的弯路多。
深蓝学院推出了『视觉SLAM进阶:从零开始手写VIO』线上课程,由中科院自动化所博士贺一家和慕尼黑工业大学博士后高翔进行授课。
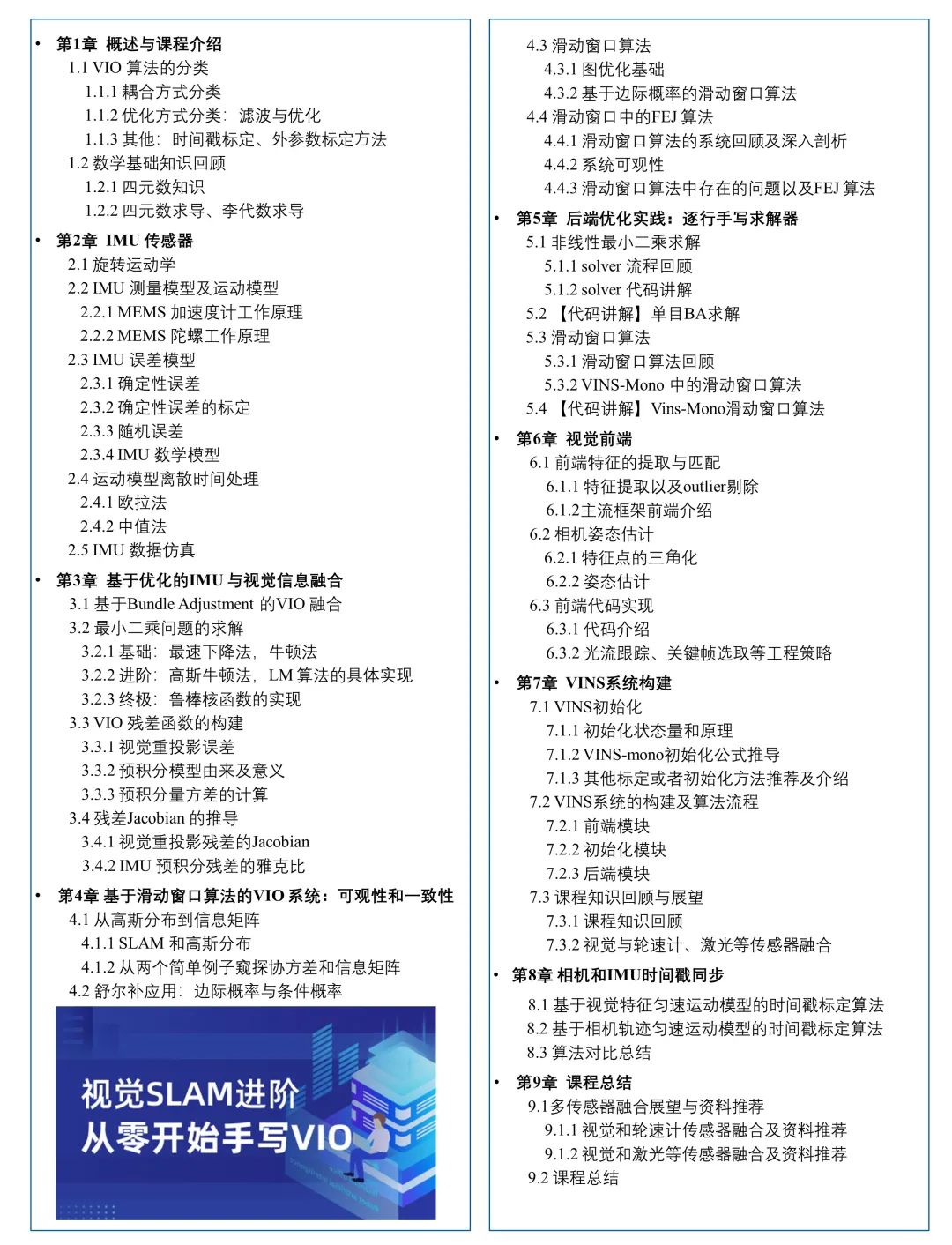
课程课程重点讲解了预积分、滑动窗口滤波算法、边缘化、优化等重要原理和过程,抓住VIO的主线详细介绍了系统各个模块的内容,帮助伙伴们高效学习,透彻理解原理并实现应用落地。
课程讲师
课程大纲
实践项目(部分)
本门课程采用理论与实践相结合的教学方式,每章节后都有实践项目,让大家将课上所学知识,即学即用,通过亲自动手实践达到灵活掌握,融会贯通的效果。

(点击查看大图)
学后收获
1. 学习过程中一步一步推导公式,打下扎实的数学基础;
2. 通过学习视觉和IMU的信息融合,掌握基于图优化的多传感器信息融合框架;
3. 通过手写后端优化器,理清SLAM后端的每个细节,加深对优化的理解,为以后工作中移植、加速或改进自有的SLAM系统提供技术支持;
还能收获
1. 优质的学习圈子
伙伴们大多是来自985、211及海外院校硕博,在这里大家一起学习、进行讨论与研究。独一无二的优质圈子将是你未来学习与就业的宝贵资源。
2. 企业认可的证书
学完课程后将有机会收获优秀学员证书、毕业证书,为你的简历加分添彩。
课程服务
1. 三师助力
讲师&助教及时答疑解惑,班主任全程带班督学,帮你克服拖延,不断进步。
2.定期班会
助教1V1批改作业,并在班会中进行讲评和指导;在班会中,学习更多技巧;在交流中收获更多思路。
咨询更多
扫码添加深蓝学院-辛宇
备注【525】,优先通过好友哦
评论