
终于来了!三维点云从入门到精通系统视频学习课程
三维点云是计算机视觉领域的重要技术之一,其在三维重建、SLAM、语义分割、3D目标检测等方向表达重要信息,主要应用领域有三维重建、工业测量、自动驾驶、移动机器人等。

1
2
第一章 绪论
点云数据与硬件 点云处理基本算法 常用点云软件及开源库
第二章 PCL基础
PCL配置 PCL中的IO模块、PCL目前支持的点云获取设备(kinnect等) PCL点云数据的存储格式(PLY、LAS、PCD等),点云数据的可视化 PCL中的类成员介绍及如何自定义PCL风格类
第三章 进阶
近邻搜索:k-d tree 与octree的概念以及相关算法; 点云滤波算法及应用案例讲解; 直线、平面检测(Ransac, Hough transform) 深度图像和点云之间的转换,RangeImage类
第四章 点云关键点、特征描述符
点云关键点、特征描述与提取(SIFT、Harris、NARF、法线特征、直方图描述子、深度图特征提取)以及应用场景分析(3D识别、位姿估计)
第五章 点云配准(两帧)
ICP类方法(ICP、point to plane ICP、Point to line ICP、MBICP、GICP、NICP方法的优缺点及应用场景)。 基于特征的配准方法 基于深度学习的配准方法
第六章 点云配准(多帧)
基于图优化的方法 基于激光 SLAM的方法
第七章 点云分割算法
基于Kmeans、DBSCAN聚类算法、颜色、体素等方法,平面、圆柱体分割、大场景点云数据分割、不规则点云数据分割
八章 点云处理进阶模块
点云处理的实例1(测量、重建、分割) 点云处理的实例2(测量、重建、分割) GPU下点云处理加速(简单介绍) 深度学习在3D点云上的应用(简单介绍)
3
4
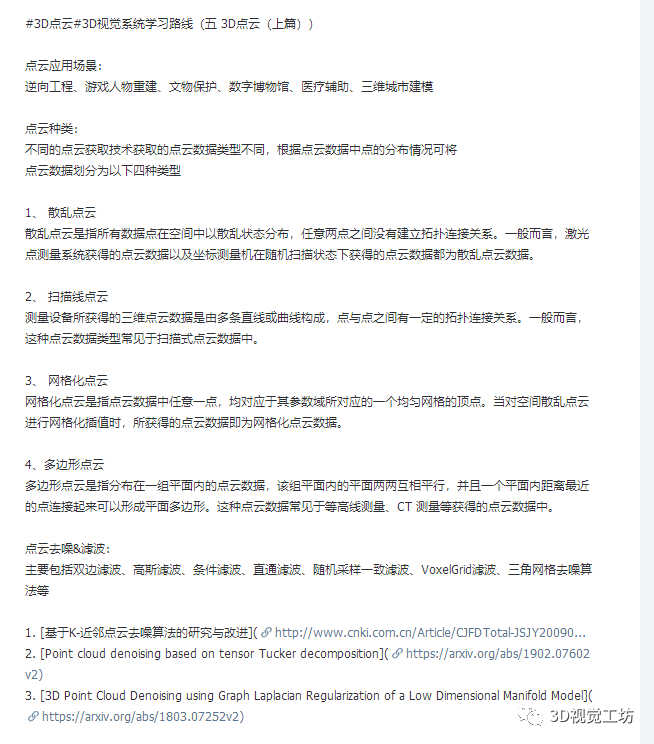
2. 优质的学习文章及代码
星球内部保持源源不断的更新领域文章和优质代码,分享VPR、ICCV、ECCV、ICRA、IROS、3DVision等顶会paper,领域包括但不限于点云处理、立体视觉、SFM、多视图几何、结构光、自动驾驶、姿态估计、3D检测、相机标定等~
5

图1 日常问答
图2 日常论文分享
图3 日常问答
图4 日常问答

图6 日常问答
2. 优质学习代码与资料分享



评论