
YOLOv7 开箱测试
环境
widnows 10 64bit torch 1.7.1+cu101
前言
近日,原 YOLOv3/YOLOv4/Scaled-YOLOv4 的团队推出了 YOLOv7,源码地址:https://github.com/WongKinYiu/yolov7,同样是基于 pytorch 框架,对应的论文地址:YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors,感兴趣的童鞋可以去读一读。
据官方的介绍,YOLOv7 是当前实时目标检测算法的 State Of The Art 也就是 SOTA,来看看下面的这张横向比较图
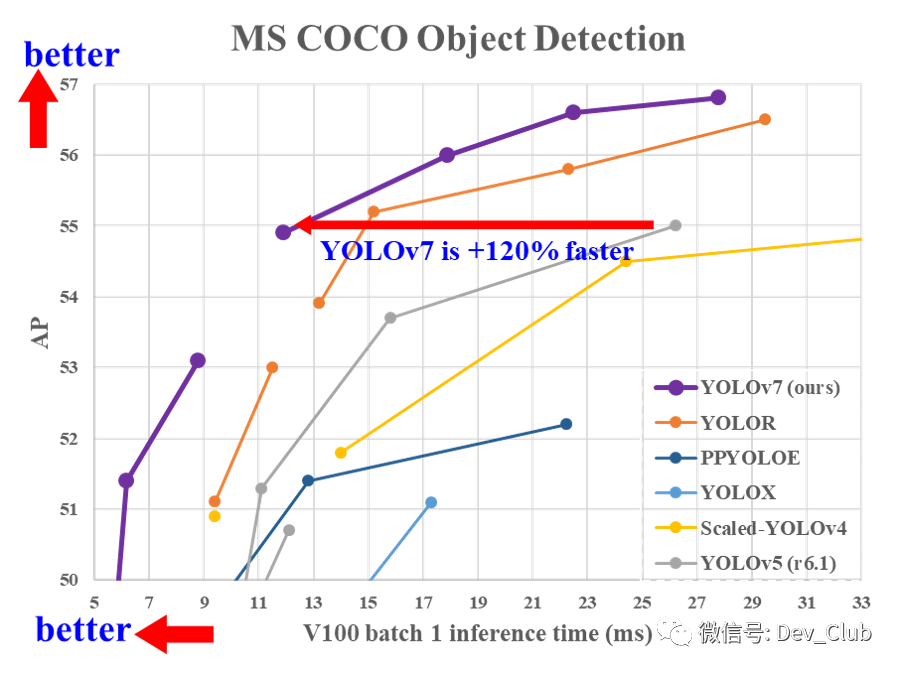
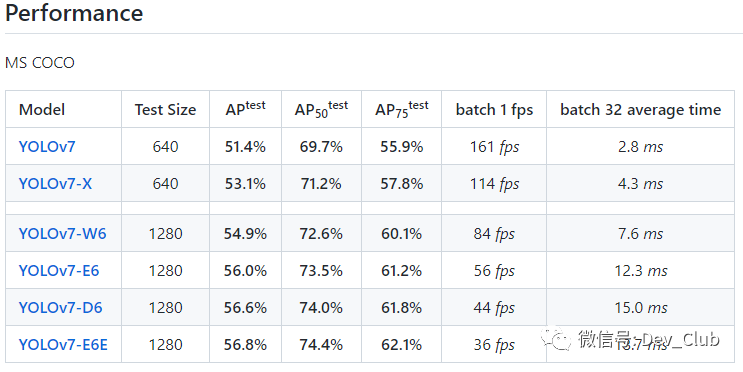
性能方面,各模型也是有不同程度的提升,看看其在 MS COCO 上的表现
代码实操
基础环境,包括 nvidia 驱动安装、python、cuda、cudnn、pytorch 等这些内容就不再讲了,不清楚的朋友,可以参考
ubuntu安装nvidia显卡驱动的2种方法 ubuntu安装cuda windows 10安装cuda和cudnn pytorch安装
首先,我们下载官方源码
git clone https://github.com/WongKinYiu/yolov7.git
cd yolov7
然后安装依赖
# 如果前面安装了pytorch,这里就将requirements.txt中的pytorch注释掉
pip install -r requirements.txt
依赖安装结束后,可以执行
python detect.py
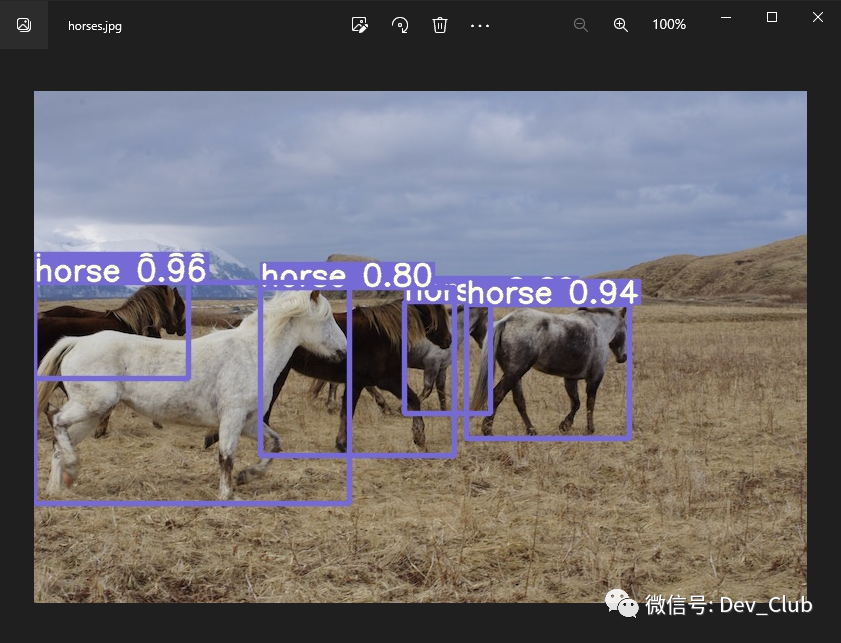
代码执行过程中会去下载模型文件 yolov7.pt,下载成功后,会去检测 inference/images 目录中的图片,这里只有一张图片

结束后,检测结果为
当然也可以指定数据源,带上参数 --source
python detect.py --source bus.jpg

如果是视频文件检测,--source 参数后面直接跟上视频文件,摄像头检测的话,--source 参数后面跟上摄像头的 id,如 0、1 ...;网络流媒体的话,也是支持 http、rtsp 和 rtmp 等协议
YOLOv7 除了实现目标检测,它还会带来人体关键点检测和实例分割这2个重要功能
目前人体关键点检测功能基本完成,我们来看看示例,在 tools/keypoint.ipynb,在 notebook 中可以直接运行。
如果需要将 ipynb 文件转成 python 文件,就执行
jupyter nbconvert --to python tools/keypoint.ipynb

将生成的 tools/keypoint.py 拷贝到源码根目录下,然后修改文件的最后部分
output = non_max_suppression_kpt(output, 0.25, 0.65, nc=model.yaml['nc'], nkpt=model.yaml['nkpt'], kpt_label=True)
output = output_to_keypoint(output)
nimg = image[0].permute(1, 2, 0) * 255
nimg = nimg.cpu().numpy().astype(np.uint8)
nimg = cv2.cvtColor(nimg, cv2.COLOR_RGB2BGR)
for idx in range(output.shape[0]):
plot_skeleton_kpts(nimg, output[idx, 7:].T, 3)
# 将结果保存下来
cv2.imwrite('person_keypoint.jpg', nimg)
# In[5]:
#get_ipython().run_line_magic('matplotlib', 'inline')
#plt.figure(figsize=(8,8))
#plt.axis('off')
#plt.imshow(nimg)
#plt.show()
然后去下载模型文件,https://github.com/WongKinYiu/yolov7/releases/download/v0.1/yolov7-w6-pose.pt,同样放在源码根目录下,准备一张测试图片,最后,执行
python keypoint.py

如果执行过程中报错

就需要去修改下 utils/plots.py,将
.cpu().numpy()
修改为
.cpu().detach().numpy()
如下图所示

这是因为 Tensor 变量带有梯度,如果直接转换为 numpy 数据将会破坏计算图,这里不需要保留梯度信息,可以在变量转换之前调用 detach()
最后,实例分割的模型还没有放出,我们持续关注。
参考资料
https://github.com/WongKinYiu/yolov7 argparse基本使用